Originariamente inviato da lucapif
Visualizza il messaggio
-
-
moduli JETI
I canali possono essere traslati. La seconda ricevente l'ho impostata sui canali 9-10-11-12.
Poi spippolando col jetibox, si arriva ad una domandina fatidica:
Cosa volete fare quando si interrompe il link del segnale?
1) continuare come se nulla fosse.
2) mettere a zero le uscite.
3) andare in failsafe.
Nella opzione uno se salite continua a salire, se andate avanti continua ad andare avanti, eccosivvia..
nella opzione 2 viene giù subito
nella olzione 3 la cosa è un po' più gestibile ma il rischio di fare casini c'e'..
falsafe o non falisafe.. questo è il problema...
Si possono fare anche altre cose come miscelazioni, inversioni, parametrizzazioni varie, ma penso sia meglio farle direttamente dal menu' della trasmittente..
Insomma un dispositivo interessante, ma la portata sembra un po' limitata..
Vedremo cosa succede sistemando meglio le antenne, ma non mi pare che si possa arrivare a 1km..Commenta
-
Scusate ma non ho capito bene o forse si lo jeti va solo fino a 300 m ? Non è un po' pochino ? Mi sembra molto strano ... a questo punto se queste sono le prestazioni conviene pensare di utilizzare un modulo WiFI 232 , un po' di codice di adattamento un micretto che interfaccia la radio , quello sembra essere uno dei componenti bidirezionali con la miglio efficenza in volo , dovuta anche alle frequenze su cui opera ovviamente....
Saluti
RobertoRedfox74
Virtual Robotix ( Arducopter DEVTEAM )
http://www.virtualrobotix.com
Canale di supporto FB
https://www.facebook.com/groups/1606596929592397/Commenta
-
moduli jeti
Forse è un problema mio.Originariamente inviato da redfox74 Visualizza il messaggio
Matrix, è arrivato a 500 al primo test.. boh.. sentiremo cosa dicono gli altri.. è un 100mW dovrebbe arrivare più lontano..
In giro avete letto qualcosa a riguardo?Commenta
-
Vero 300m sono pochi, forse dipende dal fatto che l'mk era basso sul tetto dell'auto di Gibon e quindi il segnale si propaga poco. In aria da 5m in su penso che funzioni meglio. (Superguru, se ti va, potresti provare a mettere l'mk sul terrazzo del primo piano di casa e rifare il testOriginariamente inviato da redfox74 Visualizza il messaggio )
)
Sono d'accordo anche sull'idea del wi232 ad 868 Mhz.
C'è anche l'opzione illegale e cioe' collegare un booster da 500mW a 2.4 Ghz in uscita della radio, arrivati ad un certo punto si perde la bidirezionalità ma il tx continua ad arrivare al mk.
Volevo chiederti un parere sul mondo arduino compatibile, secondo te l' x-duino e' pienamente compatibile o e' ancora immaturo?
CiaoQuadricottero News
http://www.facebook.com/QuadricotteroCommenta
-
Guarda non so' mettere troppa carne al fuoco in questo momento rischia di compromettere un po' lo sviluppo della prima versione di Multipilot 1.0 ....Originariamente inviato da danveal Visualizza il messaggio
Ho letto e guardato un po' di documentazione , ma in realtà quello che ti posso dire è che dietro ad arduino non c'e' moltisssimo codice rispetto a quello che normalmente si ha a disposizione con l'sdk della casa madre ...
La potenza di Arduino si riassume in Cinque fattori :
1) Bootloader
2) Compilatore GCC
3) Linguaggio di programmazione C (Io me ne sono innamorato a 14 anni esattamente 22 anni fa' )
4) Ide di supporto semplice , funzionale ed immediato.
5) Community di supporto ampia ... questo è un fattore decisivo.
Xduino offre sicuramente funzionalità al pari di arduino , poi andrebbe provato l'hardware ST , su cui decisamente non dubito ... Io qualche tempo fa' per un prodotto di punta della mia azienda arrivando da Motorla 68HC11 prima 68HC12 dopo avevo scelto ARM7 , decisamente un buon prodotto bene supportato ... Oggi con l'evoluzione in corso sto' puntando in modo deciso su ARM 9 - 11 per sviluppi un po' tosti con sistema operativo serio ... è inutile reinventare l'acqua calda ... basta saper usare linux embededd e fai il 95 % di quello che ti serve ...
A tal proposito ti do' una piccola anticipazione , sto' preparando un'immagine del mio ARM11 su QEMU che pubblichero' presto in modo tale che si potranno toccare con mano le potenzialità dell'ARM11 per implementare praticamente di tutto ... con questo oggetto non hai piu' limiti ... la cosa bella è che programmi ancora con l'amato GCC e ha un pc volante ... Quindi la Multipilot la utilizzero solo per stabilizzare il velivolo poi le cose serie le faremo fare ad un micro serio ...
Se mi spieghi meglio qual'e' il tuo obbiettivo posso consigliarti meglio dipende tutto da quello ...
Un saluto
RobertoRedfox74
Virtual Robotix ( Arducopter DEVTEAM )
http://www.virtualrobotix.com
Canale di supporto FB
https://www.facebook.com/groups/1606596929592397/Commenta
-
Ultimamente si vedono molte cose interessanti a basso prezzo esempio sul sito sparkfun e mi e' venuta voglia di sperimentare a tempo perso anche se tempo ne ho poco e quindi sarebbe una cosa lenta da fare quando mi va.Originariamente inviato da redfox74 Visualizza il messaggio
Non sono esperto di arm e di processori in genere sono rimasto allo Z80 e al suo assembler
In sostanza prendere una imu 6 DOF da un centinaio di dollari e interfacciarla ad un arduino, chiedevo sul x-duino perchè poi basterebbe leggere i dati IMU e far girare un PID e un quadricottero base su cui sperimentare e' fatto.
X-duino per ottenere 1 ciclo loop in pochissimo tempo, tipo 5ms.
Arduino mi verrebbe comodo perchè avendo il bootloader non ha bisogno di tools di sviluppo, e di codice in giro per interfacciare imu etc, inizia ad essercene, tipo quello di Shrediquette anche se e' scritto in basic.
Guarda questo video recente dell shrediquette, questo tricottero a mio parere (non ti offendere non e' una critica alla multipilot e ai tuoi progetti, che apprezzo ) e' nettamente migliore dell' aeroquad attuale.
tricopter test de stabilité on Vimeo
CiaoQuadricottero News
http://www.facebook.com/QuadricotteroCommenta
-
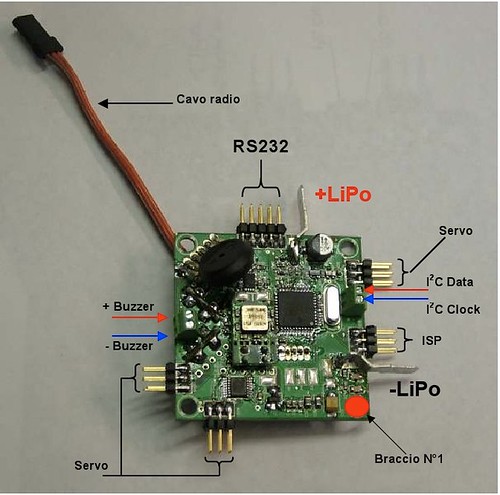
Schema Multipilot
Ecco l'ultima foto della MultiPilot 1.0 con tutte le uscite disponibili.
Un saluto
RobertoRedfox74
Virtual Robotix ( Arducopter DEVTEAM )
http://www.virtualrobotix.com
Canale di supporto FB
https://www.facebook.com/groups/1606596929592397/Commenta
-
Ciao Danveal,Originariamente inviato da danveal Visualizza il messaggio
concordo con te che il tricottero del video che sto' studiando da diverso tempo è decisamente un bel prodotto ... l'unico punto debole a detta di alcuni amici è la coda che ruota , piuttosto fragile in caso di crash o atterraggi pesanti ... è sicuramente pero' un prodotto da tenere in considerazione e da realizzare ...
Forse lo spirito della multipilot non è ancora molto chiaro , lo è ben per me perchè è mesi che ci lavoro sopra , ma dal mio punto di vista con questa architettura puoi fare la maggior parte di velivoli R/C oggi presenti sul mercato , aerei , terresti e marini ...
Non escludo la possibilità che in parallelo al progetto AeroQuad svilupperemo un tricottero sulla base di quello che mostri sul video ... il porting è fattibile , la potenza di quell'oggetto è come con così poche pagine di codice si fa' un'oggetto veramente interessante ... Questa compattenza del codice è dovuta anche all'impiego del Basic come linguaggio di programmazione del veicolo che usando wire e un po' di quelle librerie a cui sto' lavorando potrebbe essere paragonabile ...
Quindi nel progetto multipilot c'e' spazio per tutti ...
Per quanto riguarda l'idea di acquistare oggetti da sparkfun e assemblarli per fare prove si puo' sicuramente fare , ma poi se vuoi andare in volo come approccio è sconsigliabile , tra matasse di fili , cose che si staccano in volo pin che toccano e non toccano i tempi di sviluppo sono decisamente piu' lunghi che con un hardware pensato ad hoc per quello .. e il prezzo è molto simile se non inferiore a parità di accessori ....
Se ti interessa giocare un po' con queste tecnologie e contare su una neonata community di superguru italiani radunati sotto il segno della Multipilot entra nel Club e alleati a noi ;)
Se la cosa ti interessa seriamente sto' selezionando validi sviluppatori che disporranno dei primi prototipi e che si occuperanno assieme a me di porre le basi per il futuro del progetto.
Il contributo al progetto per la fornitura della scheda Multipilot con caratteristiche paragonabili a quelle della FC 2.0 in questo momento è di poco inferiore ai 300 euro finita e pronta all'uso completa di tutti gli accessori per realizzare diverse tipologie di sperimentazioni , accelerometri , giroscopi , sensore di pressione , alimentatore switching. Se ti interessano maggiori dettagli contattami pure tramite mp.
Per chi invece ha già un FC 2.0 e vuole partecipare al progetto senza dover sborsare il contributo per la Multipilot appena terminati i test mettero' online le modifiche necessarie all'uso di arduino su FC 2.0 anche se dalla solita licenza dei tedeschini volanti questa operazione viola la licenza originale Poi in futuro vi converrà prendere una Multipilot anzichè una FC 2.0 primo perchè probabilmete quando iniziero a commercializzarle costeranno meno della prima , secondo perchè ci sarà un'ampio supporto tutto italiano con tanti bei progetti da provare e sperimentare nel vostro giardino di casa o per i piu' temerari nel salotto ;)
Poi in futuro vi converrà prendere una Multipilot anzichè una FC 2.0 primo perchè probabilmete quando iniziero a commercializzarle costeranno meno della prima , secondo perchè ci sarà un'ampio supporto tutto italiano con tanti bei progetti da provare e sperimentare nel vostro giardino di casa o per i piu' temerari nel salotto ;)
Ovviamente poi vorro' vedere i vostri video ;)
Ho aggiunto un'altra foto che ho postato anche qui con il layout della MultiPilot.
lnmultipilot10 - Project Hosting on Google Code
Un saluto e a presto
RobertoRedfox74
Virtual Robotix ( Arducopter DEVTEAM )
http://www.virtualrobotix.com
Canale di supporto FB
https://www.facebook.com/groups/1606596929592397/Commenta
-
scheda
Bella bambina, mi piace.. un bel lavoro ! Me la sognerò la notte.. e di giorno sbaverò invidioso...Originariamente inviato da redfox74 Visualizza il messaggio
Commenta
-
Jet
Oggi se riesco a liberarmi, faccio qualche altro test con i moduli.. Le antenne erano puntate verso di me e vicine fra loro. SUlla spectrum son di serie a 180*.Commenta
-
tricopter
Simpatico il volo del tricopter
ma come payload?Commenta
-
Modulo Jeti
gibon e tutti i possessori di moduli Jeti, che prove avete fatto?
per il discorso potenza, secondo voi è possibile aprire in modo tranquillo, senza fare danni, il modulo di trasmissione?
Bisognerebbe dare un'occhiata alla parte TX RF.
Ho una mezza idea.....
DommyCommenta
-
Ciao, io ho il modulo universale quello da inserire all'interno quindi la schedina e' "a vista" ma deve ancora arrivarmi.Originariamente inviato da dommy Visualizza il messaggio
Per il tricottero il payload dipende strettamente dai motori e dalle eliche che dipendono dai controller che sono i soliti BL dell' MK in I2C.
Sono d'accordo con Redfox sul fatto che il punto debole potrebbe essere il servo di coda e il meccanismo meccanico di rotazione.
@Redfox che gyro monta la scheda? Comunque vedro' come procede lo sviluppo software della multipilot magari piu avanti mi aggrego, prima voglio fare qualche esperimento a basso costo.
CiaoQuadricottero News
http://www.facebook.com/QuadricotteroCommenta
-
jeti
Non saprei oggi guardo se è possibile aprirlo.. Comunque stavo pensando che anche se il modulo trasm è do 100mw, la ricevente non lo sarà.. quindi quando la trasmittente bippa e perde il feedback magari il MK è ugualmente controllbile, dopo un buon settaggio del volo in mancanza del segnale.. vedremo..Originariamente inviato da dommy Visualizza il messaggioCommenta
Commenta