Originariamente inviato da kamikazeta
Visualizza il messaggio
Io ne ho diversi e gli unici rotti sono quelli dfr.
per l'alimentazione dal pin +5 bisogna cambiare qualcosa sul codice?
quella è sempre una entrata o può anche essere una uscita? è possibile alimentarlo dalla shield?
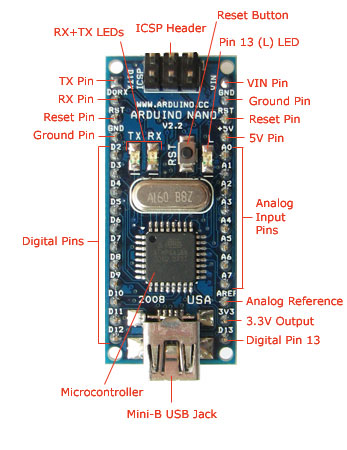
Il 4° pin dall'alto sulla fila di destra, nella foto sotto:
intanto vedo se riesco a recuperare un regolatore adattabile


 , tu gli volevi far dare i 5v al pin d11, che è configurato come un output pwm....non sarebbe stato molto contento (come infatti ti ha detto Toshiro)
, tu gli volevi far dare i 5v al pin d11, che è configurato come un output pwm....non sarebbe stato molto contento (come infatti ti ha detto Toshiro) 





 .
. Sergio
Sergio
Commenta