Originariamente inviato da redfox74
Visualizza il messaggio
mentre per pilotare le uscite PWM usa semplicemente l'analogwrite che dovrebbe utilizzare il timer1 ... è corretto ?
C'e' una ragione per usare timer1 per i pwm non è meglio fare il contrario ?
C'e' una ragione per usare timer1 per i pwm non è meglio fare il contrario ?
Cosa intendi per fare il contrario?
Mi sono studiato bene il funzionamento del PWM usato in Servotimer2 ... praticamente:
si alza il pin con una write sul pin che interessa.
si carica il registro per dare l'ampiezza
scaduta il timer che da' l'ampiezza
si abbassa il pin con una write sul pin .
si ricarica il registro timer con l'attesa per sincronizzare il secondo burst
e si ritorna all'inizio.
Domanda : nella servotimer2 in realtà la frequenza d'uscita varia al variare dell'ampiezza della forma d'onda che comanda l'esc , ma la stessa cosa accade anche con la tua funzione ? Ho visto in alcune versioni della Servotimer2 c'e' un tentativo di mantenere la frequenza costante che pero' mi sembra funzionare male o non funzionare del tutto ...
si alza il pin con una write sul pin che interessa.
si carica il registro per dare l'ampiezza
scaduta il timer che da' l'ampiezza
si abbassa il pin con una write sul pin .
si ricarica il registro timer con l'attesa per sincronizzare il secondo burst
e si ritorna all'inizio.
Domanda : nella servotimer2 in realtà la frequenza d'uscita varia al variare dell'ampiezza della forma d'onda che comanda l'esc , ma la stessa cosa accade anche con la tua funzione ? Ho visto in alcune versioni della Servotimer2 c'e' un tentativo di mantenere la frequenza costante che pero' mi sembra funzionare male o non funzionare del tutto ...
All'atto pratico "sembra" funzionare (il servo funziona e non prende fuoco
 ) ma non ho modo di verificarne la bontà e la stabilità in frequenza finchè non guardo la forma d'onda con un oscilloscopio.
) ma non ho modo di verificarne la bontà e la stabilità in frequenza finchè non guardo la forma d'onda con un oscilloscopio.
Ho fatto delle prove e si riesce a clocckare anche fino a700 hz sulla multipilot .... anche se forse non ha senso ...
Piu' vedo sti casini piu' amo i miei bei regolatori i2c ... ma se provassivo a vedere come vanno su Multiwii ... mettendo i pwm su Quadfox .. le prestazioni sembrano degradare di molto rispetto ai livelli attuali ...
ti aspetto in skype il mio account è sempre il solito virtualrobotix .. bussa quando sei online che facciamo una chiacchierata ...


")
")
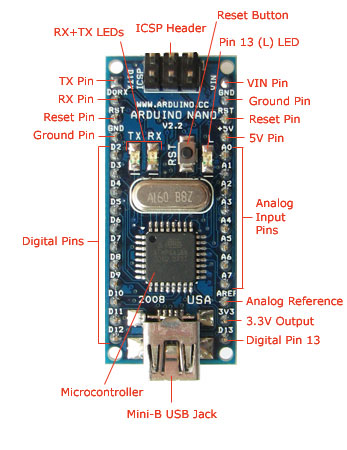

 ,il mio nano è la versione 3.0 quindi con i lati a 45° rispetto il lato della board,quindi se qualcuno dovesse montare la MultiWII dovrà controllare questo"piccolo"particolare,è quello che intendevo fin dall'inizio,non ho mai detto che i pin del nano riservati all'I2C non fossero A4 e A5,solo qualcosa non tornava
,il mio nano è la versione 3.0 quindi con i lati a 45° rispetto il lato della board,quindi se qualcuno dovesse montare la MultiWII dovrà controllare questo"piccolo"particolare,è quello che intendevo fin dall'inizio,non ho mai detto che i pin del nano riservati all'I2C non fossero A4 e A5,solo qualcosa non tornava  e poi sarei io il permaloso...
e poi sarei io il permaloso... 
 cioè bippavano nei modi più disparati poi smettevano e poi ricominciavano ma i motori non partivano.
cioè bippavano nei modi più disparati poi smettevano e poi ricominciavano ma i motori non partivano.
Commenta