Originariamente inviato da liftbag
Visualizza il messaggio
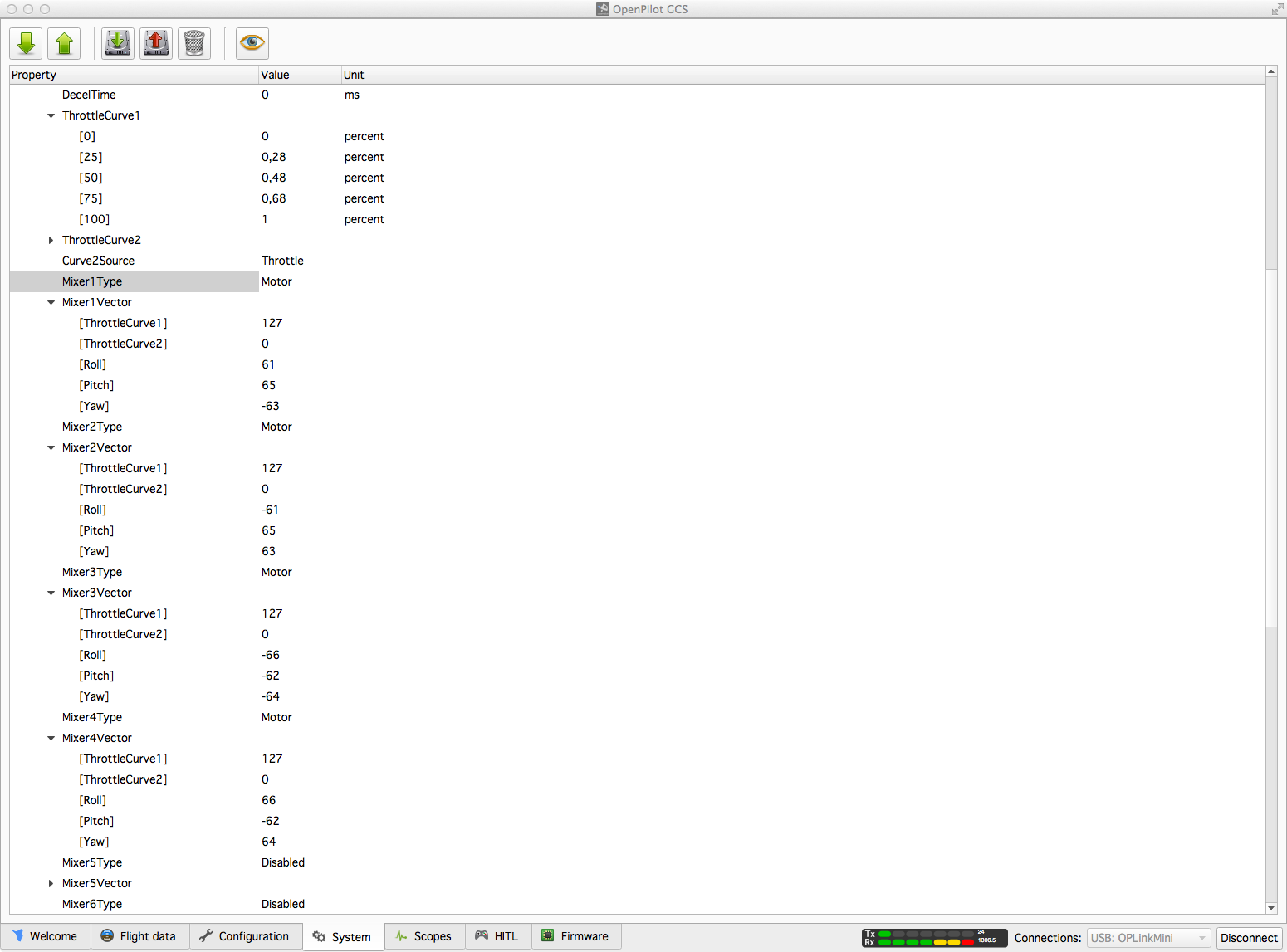
Visto che ci sono ti chiedo altro, mi piace il frame V-TAIL, ma poi come faccio ad impostare la CC3D per questo frame, cioè, non ho idea di quali e di come cambiare i vari parametri giusti.







Commenta