Originariamente inviato da quadkiller
Visualizza il messaggio
Cosi' e' senza trim:
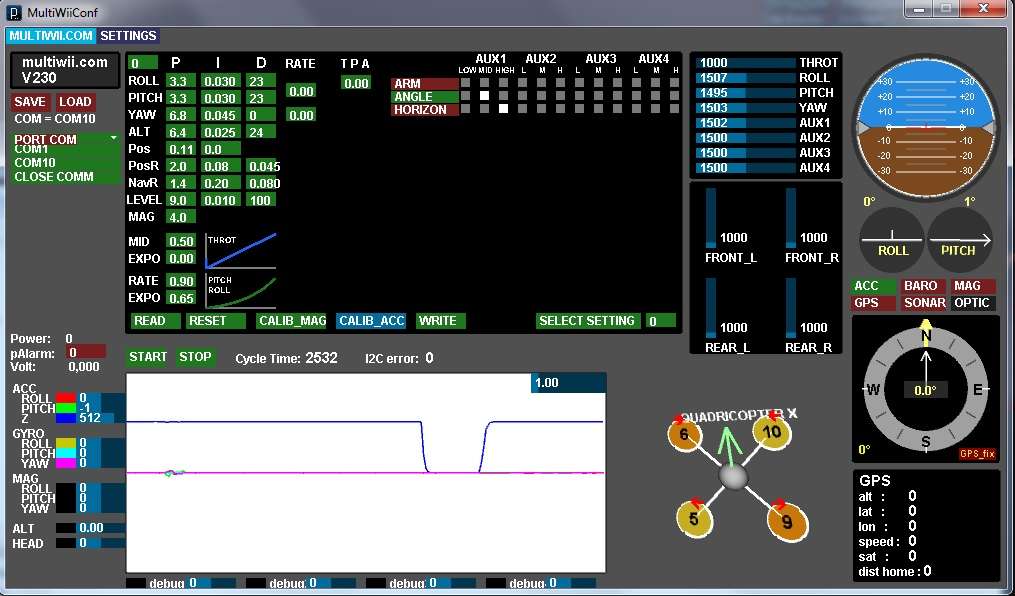


 : quando faccio partire il MultiwiiConf o il GUI il contatore I2C error sbarella, quindi immagino di avere problemi sulla trasmissione dati della IMU, che effettivamente sfarfalla abbastanza, salvo qualche volta che appare regolare. Io ho collegato Vcc, GND, SDA e SCL della IMU rispettivamente a 5V, GND SDA e SCL di arduino mega, ma non so se effettivamente ci sia bisogno di qualche resistenza di pull-up da inserire. Consigli? La IMU è la gy-86. Grazie mille a tutti
: quando faccio partire il MultiwiiConf o il GUI il contatore I2C error sbarella, quindi immagino di avere problemi sulla trasmissione dati della IMU, che effettivamente sfarfalla abbastanza, salvo qualche volta che appare regolare. Io ho collegato Vcc, GND, SDA e SCL della IMU rispettivamente a 5V, GND SDA e SCL di arduino mega, ma non so se effettivamente ci sia bisogno di qualche resistenza di pull-up da inserire. Consigli? La IMU è la gy-86. Grazie mille a tutti 


")




")

Commenta