Le schede di controllo con firmware Arducopter o MegaPirateNG dispongono di una interessante possibilità di controllo remoto tramite protocollo MAVLINK. Tale protocollo è utilizzato dal sw Mission Planner per configurare e controllare il multicottero da PC.
Sono disponibili anche diverse app Android, su tablet o smartphone, per effettuare le operazioni di configurazione e soprattutto di controllo remoto del multicottero senza la necessità di portarsi in giro un PC (Andropilot, DroidPlanner, AndroidGCS, ecc.)
Sicuramente Mission Planner su PC rimane lo strumento più completo per configurare e controllare il multicottero (Arducopter o MegaPirateNG) ma una volta che le operazioni base sono state fatte poter controllare il mezzo da un tablet o da uno smartphone è sicuramente comodo.
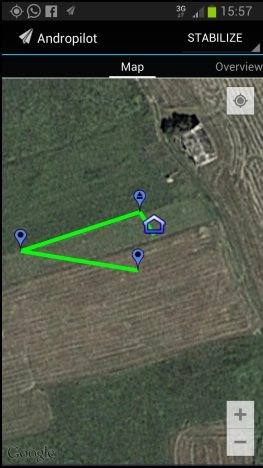
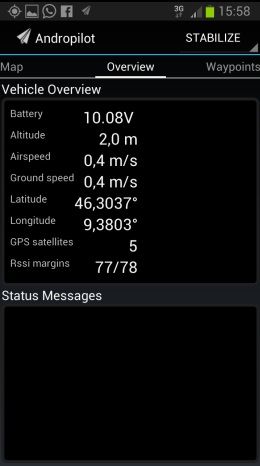
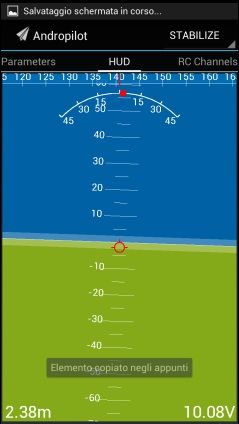
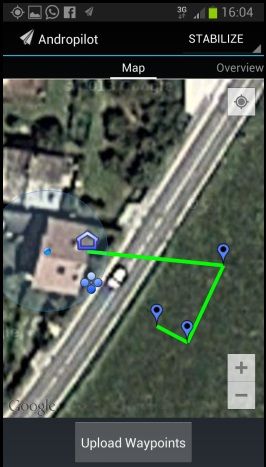
Questo thread è dedicato alla applicazione ANDROPILOT che, tra le diverse app provate, mi sembra alla data quella più completa e comoda da usare.
L'applicazione ANDROPILOT, sviluppata dal simpatico Kevin Hester, è disponibile gratuitamente sia su Google PlayStore sia come file apk in ambiente di sviluppo.
Qui ci sono un po' di riferimenti (link per scaricare il sw, lista di compatibilità, pagine wiki, ecc.):
https://github.com/geeksville/arduleader/downloads
https://github.com/geeksville/arduleader/wiki
https://github.com/geeksville/ardule...0Users%20Guide
Andropilot Users Group - DIY Drones
Andropilot Overview on Vimeo
Luciano
.
Sono disponibili anche diverse app Android, su tablet o smartphone, per effettuare le operazioni di configurazione e soprattutto di controllo remoto del multicottero senza la necessità di portarsi in giro un PC (Andropilot, DroidPlanner, AndroidGCS, ecc.)
Sicuramente Mission Planner su PC rimane lo strumento più completo per configurare e controllare il multicottero (Arducopter o MegaPirateNG) ma una volta che le operazioni base sono state fatte poter controllare il mezzo da un tablet o da uno smartphone è sicuramente comodo.
Questo thread è dedicato alla applicazione ANDROPILOT che, tra le diverse app provate, mi sembra alla data quella più completa e comoda da usare.
L'applicazione ANDROPILOT, sviluppata dal simpatico Kevin Hester, è disponibile gratuitamente sia su Google PlayStore sia come file apk in ambiente di sviluppo.
Qui ci sono un po' di riferimenti (link per scaricare il sw, lista di compatibilità, pagine wiki, ecc.):
https://github.com/geeksville/arduleader/downloads
https://github.com/geeksville/arduleader/wiki
https://github.com/geeksville/ardule...0Users%20Guide
Andropilot Users Group - DIY Drones
Andropilot Overview on Vimeo
Luciano
.



")


 .
.

Commenta