-
siete solo voi dronaroli e fotografi volanti che infischiandovene di qualsiasi regola avete creato problemi a tutti. fatevene una ragione, siete il cancro dell'aeromodellismo (cit. ergonomix) -
Ops....altro problema derivato da un mio errore....
quando ho misurato la distanza tra M2 e M5 (guardando il disegno) non mi sono accorto che un braccetto non era giusto nella sua sede.....
Rimisurando dopo averlo sistemato il risulatato e' 31,5 cm.....
Quindi ne deduco che i motori non sono disposti seguendo un cerchio ma un leggero ovale...Oh povero me....tanti anni buttati via.....Originariamente inviato da uno sbruffone
Commenta
-
[QUOTE=liftbag;4436151]Ciao. Devo ancora mettermici a capire come fare con windows, devo trovare il tempo, e se ne vengo a capo descrivo come ho fatto.
Ciao liftbag per windows ci sono i pacchetti di installazione dedicati che puoi trovare al link:
Scarica Python | Linguaggio di programmazione Python
domanda ma lo script calcola solo la table mixer per esa o anche per quad assimmetrici tipo deadcat qu4d ecc?
maxCommenta
-
Ciao.Originariamente inviato da msrmax Visualizza il messaggio
Quello lo sapevo, e l'ho installato, ma non mi ci sono ancora dedicato. Quel poco che ci ho dedicato non mi è servito a capire come lanciare lo script per avere i valori restituiti a video.
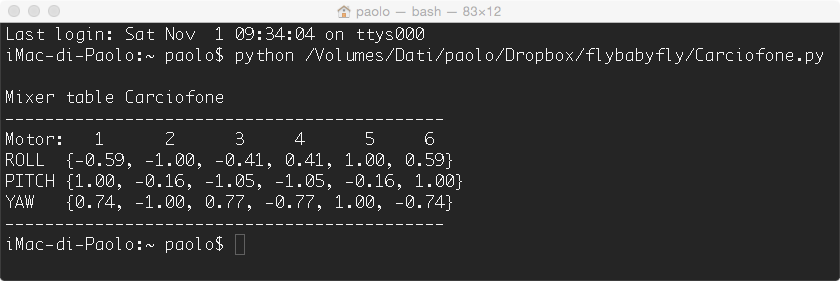
Lo script calcola qualsiasi matrice a partire dal quadricottero. Basta editarla.
In teoria puoi estendere la matrice all'infinito, anche per 10, 12 e così via bracci, ma è inutile, in quanto già l'octo è praticamente sempre simmetrico.
Ma la matrice a 8 è comunque utile per l'Octo X asimmetrico, tipo Spider Hero, dove i motori push pull avranno valori identici eccetto per il yaw, di segno opposto.
Ad ogni modo, in questo post, trovi in allegato uno script che calcola quad, esa e octo.Commenta
-
Ok, la matrice con le due correzioni che mi hai dato.Originariamente inviato da Aduken Visualizza il messaggio
Commenta
-
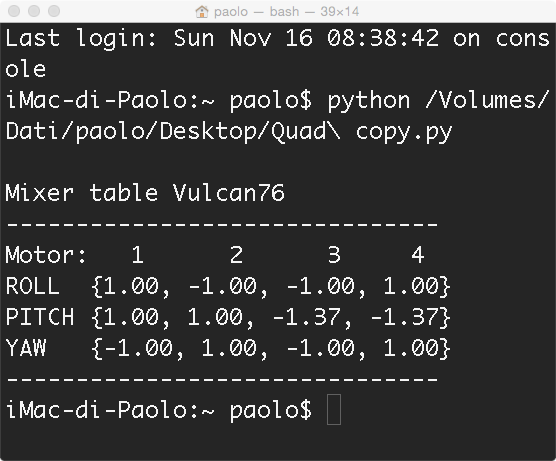
Mixer Quad asimmetrico
Ciao a tutti, in attesa di riuscire ad editarmeli da solo con python su windows, sto studiando, chiedo a qualcuno che mi possa aiutare questa volta a calcolare il mixer table in riferimento alle quote che vi scrivo sotto:
------X-----Y
M1 +80 +100
M2 +80 -100
M3 -110 -100
M4 -110 +100
La configurazione è quella per CC3D
Grazie a tutti
CiaoUltima modifica di Vulcan76; 16 novembre 14, 17:10.Commenta
-
Praticamente un H con baricentro spostato in avanti.Originariamente inviato da Vulcan76 Visualizza il messaggio
Dovresti variare anche il thrust tra coppie di motori anteriori e posteriori, o rivedere il tutto portando il centro di gravità in posizione equidistante da coppia motori anteriori e posteriori.
Se vuoi usarlo così, la matrice è questa
Farà in modo che le rotazioni avvengano sul punto da te scelto per misurare le coordinate dei motori, ma non risolverà lo squilibrio di spinta statica dei moto propulsori.
Io ho una configurazione molto simile, ma al contrario, con baricentro spostato indietro.
Non posso fare altrimenti, così ho abbinato due differenti curve gas alle coppie di motori.
Se usi openpilot, non puoi usare queli valori, in quanto 137 è ben oltre il massimo valore possibile del mixer, che è 127.
Ti conviene fare così: dove c'è 1.00 usi 64, dove c'è 1.37 usi 88.Commenta
-
Originariamente inviato da liftbag Visualizza il messaggio
Grazie infinite, infatti il baricentro è spostato in avanti rispetto il centro di spinta di circa 1 centimetro.
Per quanto riguarda la spinta statica ci avevo pensato che dovessi configurare due curve, farò delle prove e me le costruirò a dovere.
Ti faccio una domanda per capire se quello che ho notato è corretto per come l'ho inteso oppure stò sbagliando: quando ho fatto il tuning iniziale con il flag su TxPID su di un quad tipo QUAV250, ho notato che traslava all'indietro per colpa della batteria che risultava troppo arretrata. Finito il tuning ho defleggato TxPID, ho rivolato ed era stabilissimo senza alcuna traslazione in nessuna direzione e senza spostare la batteria dalla posizione iniziale.
E' possibile che quando si è in TxPID la stabilizzazione degli accelerometri sia quantomeno molto limitata? E se è così sarebbe corretto a questo punto costruirsi una curva di spinta per annullare questi movimenti?
Spero di essermi spiegato bene, attendo lumi e spero che i miei quesiti possano servire anche ad altri
Saluti e grazieCommenta
-
Io suppongo che tu abbia usato TxPID come raccomandato per OP Tune, cioè con integral e derivative a zero.Originariamente inviato da Vulcan76 Visualizza il messaggio
Se è così, è tutto spiegato facilmente. L'integrale a zero non corregge alcuna deriva.
Cioè, con gli integrali a zero l'UAV sta fermo in hovering solo se il centro di gravità è coincidente col centro di spinta.
Infatti, per crearti le due curve ad hoc, devi riazzerare il Pitch Integral e metterlo in hovering.
Vedrai che che tende nuovamente a traslare in avanti.
Allora vai in System > Settings > MixerSettings.
Controlla che le due curve ThrottleCurve1 e 2 siano identiche a 0 - 0.225 - 0.45 - 0.675 - 0.9. Se non le sono, reimpostale esattamente così.
Ora vai a modificare in Mixer3Vector > [ThrottleCurve1] a 0 e [ThrottleCurve2] a 1.
Fai lo stesso per Mixer4Vector.
Mettilo in hovering e verifica che trasla in avanti (perché le curve sono identiche).
Ora comincia a ridurre la pendenza della ThrottleCurve2, sempre lineare, per esempio 0 - 0.21 - 0.42 - 0.63 - 0.84.
Vedrai che la traslazione diminuisce.
Modifica la curva 2 fino a quando la traslazione cessa.
Ora sei pronto per riportare l'integral come era prima.
Ma sarebbe meglio che rifacessi i PID con la nuova matrice e le curve differenziate.
[EDIT]
Non so se tutto questo è OT, ma anche se riferito al software openpilot, riguarda un'aspetto fondamentale per il corretto tuning di un multi rotore asimmetrico.
Non conosco altre piattaforme di volo, ma se prevedono più curve gas da assegnare a piacimento ai singoli motori, il ragionamento è esteso anche a quelle.
Per le piattaforme di controllo del volo che non prevedono più di una throttle curve, l'unica cosa da fare e il solito dogma della corretta impostazione del multi rotore, cioè centro di gravità coincidente col centro di spinta.Ultima modifica di liftbag; 16 novembre 14, 18:52.Commenta
-
Chiarissimo! è vero non ci avevo pensato, con I a zero non si hanno correzioni.Originariamente inviato da liftbag Visualizza il messaggio
Bene ora si tratta solo di trovare un pò di tempo e che in quella circostanza almeno non piova.
Grazie Lift sei sempre preziosissimo e chiarissimo.
CiaoCommenta
-
Domanda stupida:
Ma questa matrice poi dove si inserisce?siete solo voi dronaroli e fotografi volanti che infischiandovene di qualsiasi regola avete creato problemi a tutti. fatevene una ragione, siete il cancro dell'aeromodellismo (cit. ergonomix)Commenta
-
se pensi a naze, dalla cli.La bibbia dei Bladoni V6, Blade 120SR - Guida Crius Aio Pro V1.3
ATOM 500 - Blade 400 FBL STRETCHED 6s - 120SR.Commenta
-
In openpilot, o in vehicle nella scheda CustomOriginariamente inviato da quadkiller Visualizza il messaggio
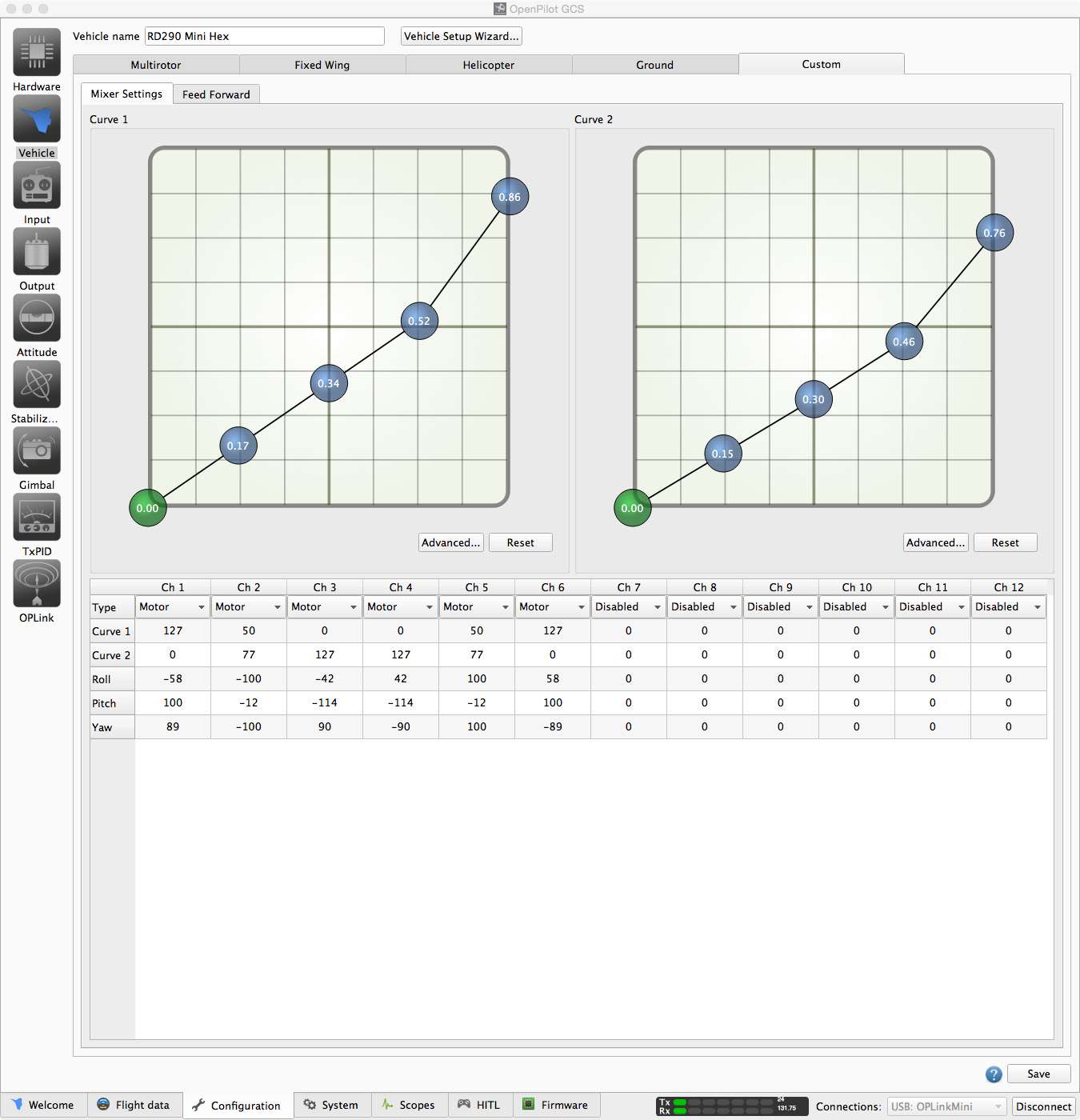
oppure nello UAV Objet Browser

Se non ricordo male, anche la Naza ha un menu nascosto per aggiustare la mixer table.Commenta
-
Grazie
Ho cercato nei comandi cli di naze 32, ma non sono riuscito a trovare.siete solo voi dronaroli e fotografi volanti che infischiandovene di qualsiasi regola avete creato problemi a tutti. fatevene una ragione, siete il cancro dell'aeromodellismo (cit. ergonomix)Commenta
-
La bibbia dei Bladoni V6, Blade 120SR - Guida Crius Aio Pro V1.3
ATOM 500 - Blade 400 FBL STRETCHED 6s - 120SR.Commenta
-
Accedi o registrati
- Accedi con


Commenta