Originariamente inviato da Vulcan76
Visualizza il messaggio
Originariamente inviato da MATTYMEY79
Visualizza il messaggio
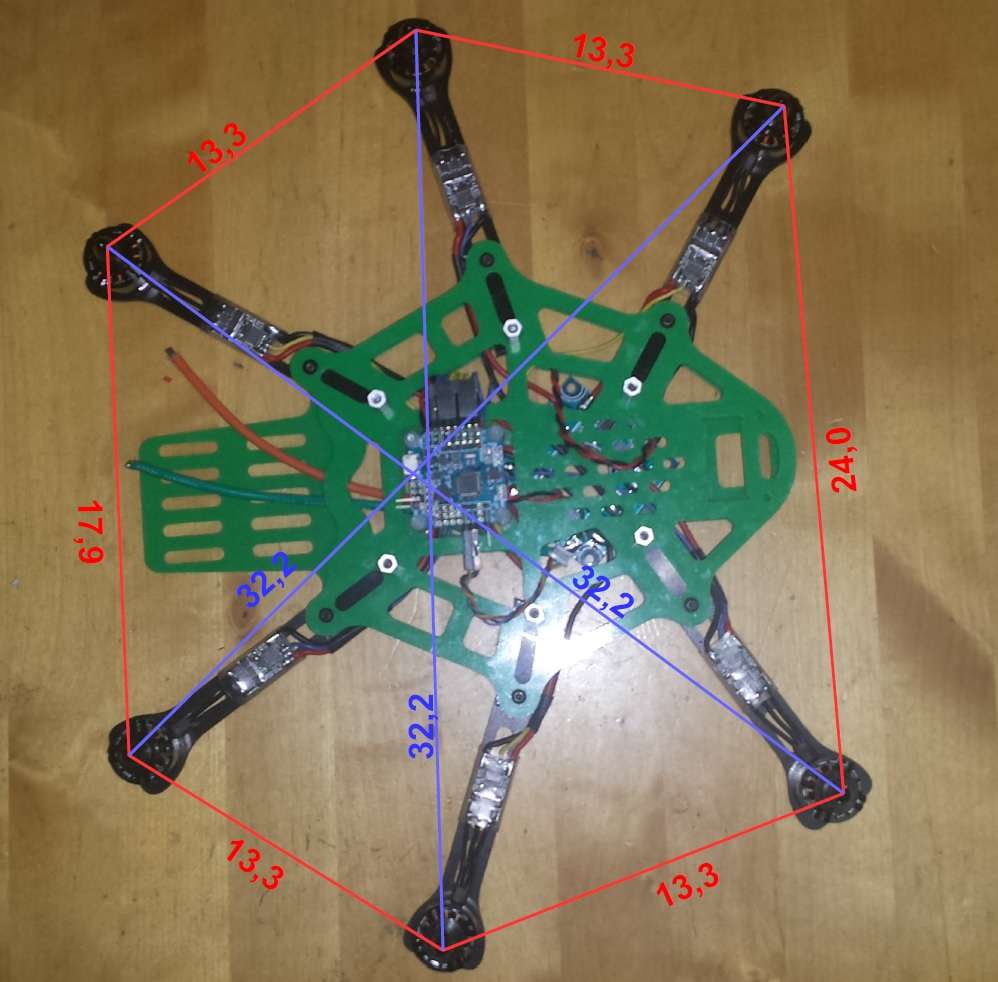
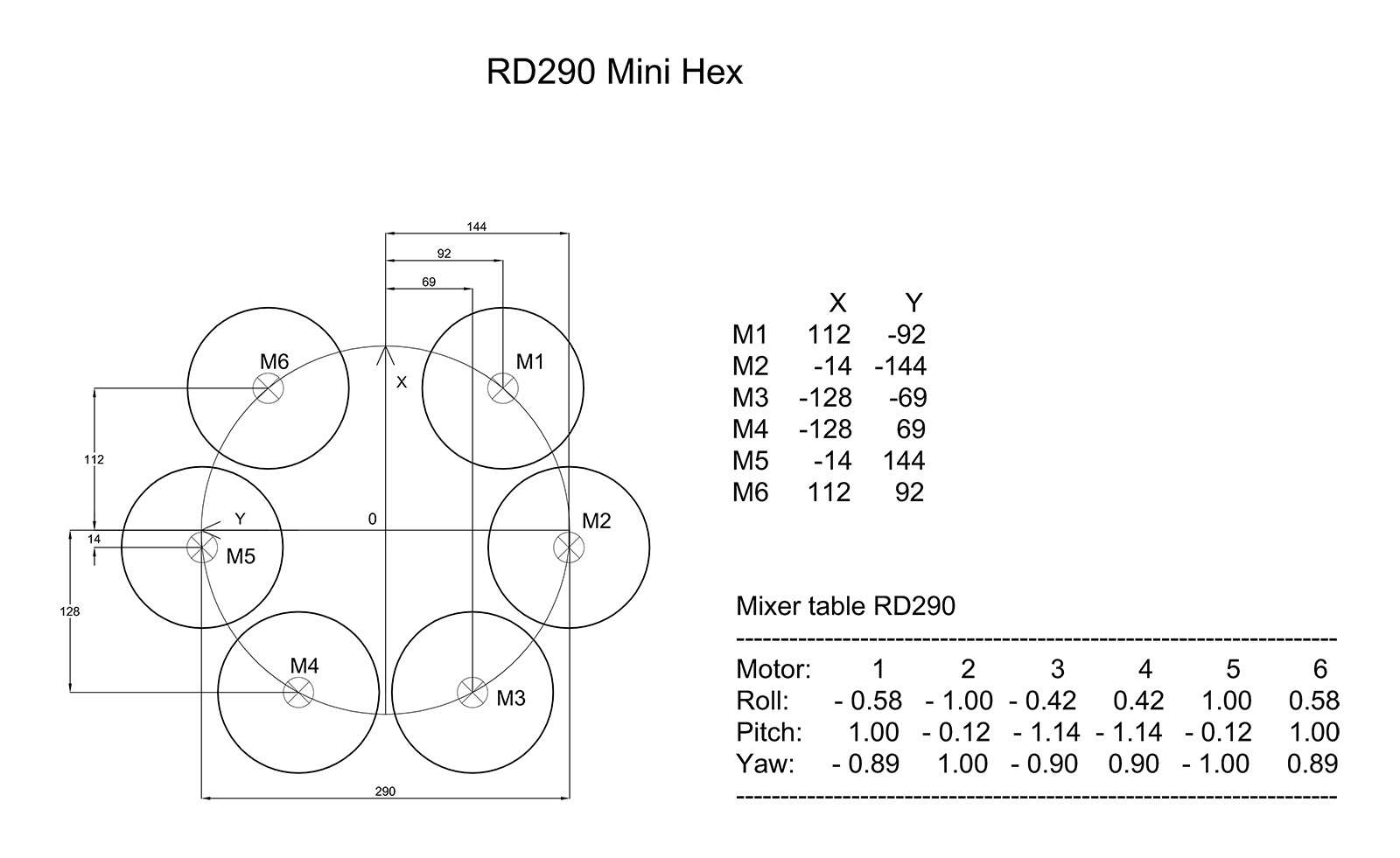
Ad ogni modo aggiornerò a breve un concetto fondamentale sui mezzi asimmetrici, e cioè la distinzione tra il centro di spinta ed il centro delle rotazioni, un problema con cui mi sono cimentato allestendo un mezzo esageratamente asimmetrico.
Appena trovo il tempo...




")





Commenta