Benvenuto su DroneRC.it: se sei alla tua prima visita e vuoi unirti alla nostra comunità puoi registrarti a questo link Registrazione, se invece sei un utente registrato ed hai dimenticato i tuoi dati di accesso devi effettuare il recupero qui Recupero Password.
Oppure se semplicemente vuoi iniziare a leggere i messaggi lasciati dagli altri utenti, seleziona un forum dalla lista qui sotto.
annuncio
Comprimi
Ancora nessun annuncio.
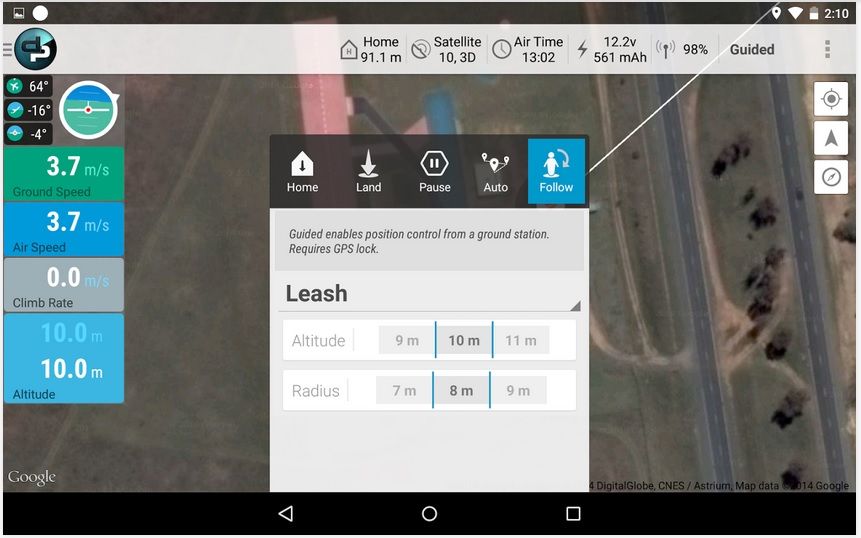
DroidPlanner 2 - Nuova Ground Control Station Android
In sostanza crea una semplice missione e ti dice sulla mappa dove posizionarti (circa 8m dal modello). Quando attivi la modalità AUTO il modello parte, si ferma un attimo a pochi metri, poi si allontana a circa 50 m e 30 m di altezza poi ritorna da dove è partito, il tutto tenendo sempre la telecamera verso di te.
Bella invece la funzionalità di Follow Me con guinzaglio (Leash)
In pratica appena attivi il Follow Me (con il pratico bottone) il modello ti segue ma non si mette sulla tua testa ma si ferma alla distanza impostata nel menu. Durante il Follow Me puoi cambiare dinamicamente l'altezza del modello (Altitude) e la distanza da te che vuoi che il modello mantenga (Radius). Molto comodo e molto sicuro.
Per fermare il Follow Me puoi usare il tasto Pause o cambiare modalità di volo dal tablet o dalla radio RC.
Inizio a valutare di pensionare le mie naza...
Fin'ora hanno fatto bene il loro lavoro ma adesso Apm
Sta spingendo sull'acceleratore...
TermicOne io ci sono andato matto per il menu da tirare su
Ci sono arrivato x logica Android ieri sera...
TermicOne io ci sono andato matto per il menu da tirare su
Ci sono arrivato x logica Android ieri sera...
Io sono andato invece sulla documentazione delle releases perchè nelle release precedenti i menù c'erano ma si aprivano da destra...nell'ultima release hanno cambiato penso per migliorare l'operatività con gli smartphone....ma ci sono veramente impazzito.
Tutto chiaro ora... Solo che in follow me sembra ubriaco il Quad...
TermicOne ho visto che usi la 3.2 Rc ci sono migliorie con il follow rispetto alla 3.15??
Tutto chiaro ora... Solo che in follow me sembra ubriaco il Quad...
TermicOne ho visto che usi la 3.2 Rc ci sono migliorie con il follow rispetto alla 3.15??
Si. Fino alla 2.9 funzionava bene ma nella 3.0 era stato introdotto un baco che è stato corretto solo nella 3.2-rc1 e anticipato nel fw 3.1.15 di VRbrain.
Effettivamente il follow me dalla 3.0 alla 3.2 è assai "ubriaco", il modello sembra preso dalle convulsioni ogni volta che riceve il nuovo target (ogni 2 secondi normalmente). Con la 3.2 è tutto tornato come una volta. Prova!
Si. Fino alla 2.9 funzionava bene ma nella 3.0 era stato introdotto un baco che è stato corretto solo nella 3.2-rc1 e anticipato nel fw 3.1.15 di VRbrain.
Effettivamente il follow me dalla 3.0 alla 3.2 è assai "ubriaco", il modello sembra preso dalle convulsioni ogni volta che riceve il nuovo target (ogni 2 secondi normalmente). Con la 3.2 è tutto tornato come una volta. Prova!
Qualcuno a provato il take off, a me non ha funzionato. Il fw in uso la 3.2 con APM
PS. Grazie Luciano per le tue preziose info, sempre molto precise e dettagliate
Qualcuno a provato il take off, a me non ha funzionato. Il fw in uso la 3.2 con APM
..
..si il takeoff a me ha funzionato perfettamente. Quando premo takeoff il modello decolla, si mette in GUIDED e si porta alla quota di default per il Guided Mode (7 metri) poi si ferma lì in GUIDED in attesa di comandi. Uso anch'io la 3.2.
..si il takeoff a me ha funzionato perfettamente. Quando premo takeoff il modello decolla, si mette in GUIDED e si porta alla quota di default per il Guided Mode (7 metri) poi si ferma lì in GUIDED in attesa di comandi. Uso anch'io la 3.2.
Ok, come posso riprovo forse sono andato in palla io, lo avevo inserito sull inizio della missione
PS. Ma il drone deve essere armato?
Occhio che stiamo parlando di due cose diverse. C'è il waypoint di tipo takeoff da mettere all'inizio della missione per il volo in Auto....ma non ha nulla a che fare con DroidPlanner. C'è poi la funzione takeoff di droidplanner che si attiva a mano e passa in. Guided
Occhio che stiamo parlando di due cose diverse. C'è il waypoint di tipo takeoff da mettere all'inizio della missione per il volo in Auto....ma non ha nulla a che fare con DroidPlanner. C'è poi la funzione takeoff di droidplanner che si attiva a mano e passa in. Guided
mi sono spiegato male ma trovo interessante la modalità descritta da te sul post precedente, la mia prova era con 4/5 wp con l inizio in take off e la fine in land ma in pratica a fatto solo la missione quando inserito auto con il drone gia decollato da me perche il take off non ne voleva sapere.
il take off che dici tu come va inserito?
Luciano grazie per la pazienza che hai, Andrea
mi sono spiegato male ma trovo interessante la modalità descritta da te sul post precedente, la mia prova era con 4/5 wp con l inizio in take off e la fine in land ma in pratica a fatto solo la missione quando inserito auto con il drone gia decollato da me perche il take off non ne voleva sapere.
il take off che dici tu come va inserito?
Luciano grazie per la pazienza che hai, Andrea
Per fare un takeoff a inizio missione occorre mettere come primo waypoint un waypoint di tipo takeoff specificando la quota da raggiungere quindi a seguire gli altri waypoint della missione. Si arma il modello è quindi si passa in Auto. Se il gas è a 0 non succede nulla. Appena il gas è maggiore di 0 il modello decolla e inizia la missione. Se quando passi in Auto il gas è maggiore di zero allora la missione inizia subito.
La funzione takeoff di droidplanner non si inserisce nelle missioni. Serve per decollare manualmente con un bottone.
Per fare un takeoff a inizio missione occorre mettere come primo waypoint un waypoint di tipo takeoff specificando la quota da raggiungere quindi a seguire gli altri waypoint della missione. Si arma il modello è quindi si passa in Auto. Se il gas è a 0 non succede nulla. Appena il gas è maggiore di 0 il modello decolla e inizia la missione. Se quando passi in Auto il gas è maggiore di zero allora la missione inizia subito.
La funzione takeoff di droidplanner non si inserisce nelle missioni. Serve per decollare manualmente con un bottone.
Grazie per la spiegazione, come posso riproverò come hai descritto


Commenta