a sto punto, accettando un piccolo disallineamento in altezza potresti fare le estremità tutte uguali e unirle una sopra e una sotto i bracci principali senza necessità di quella piastra aggiuntiva contornata in blu.
-
quota, velocità, idee: averne sempre almeno due
-
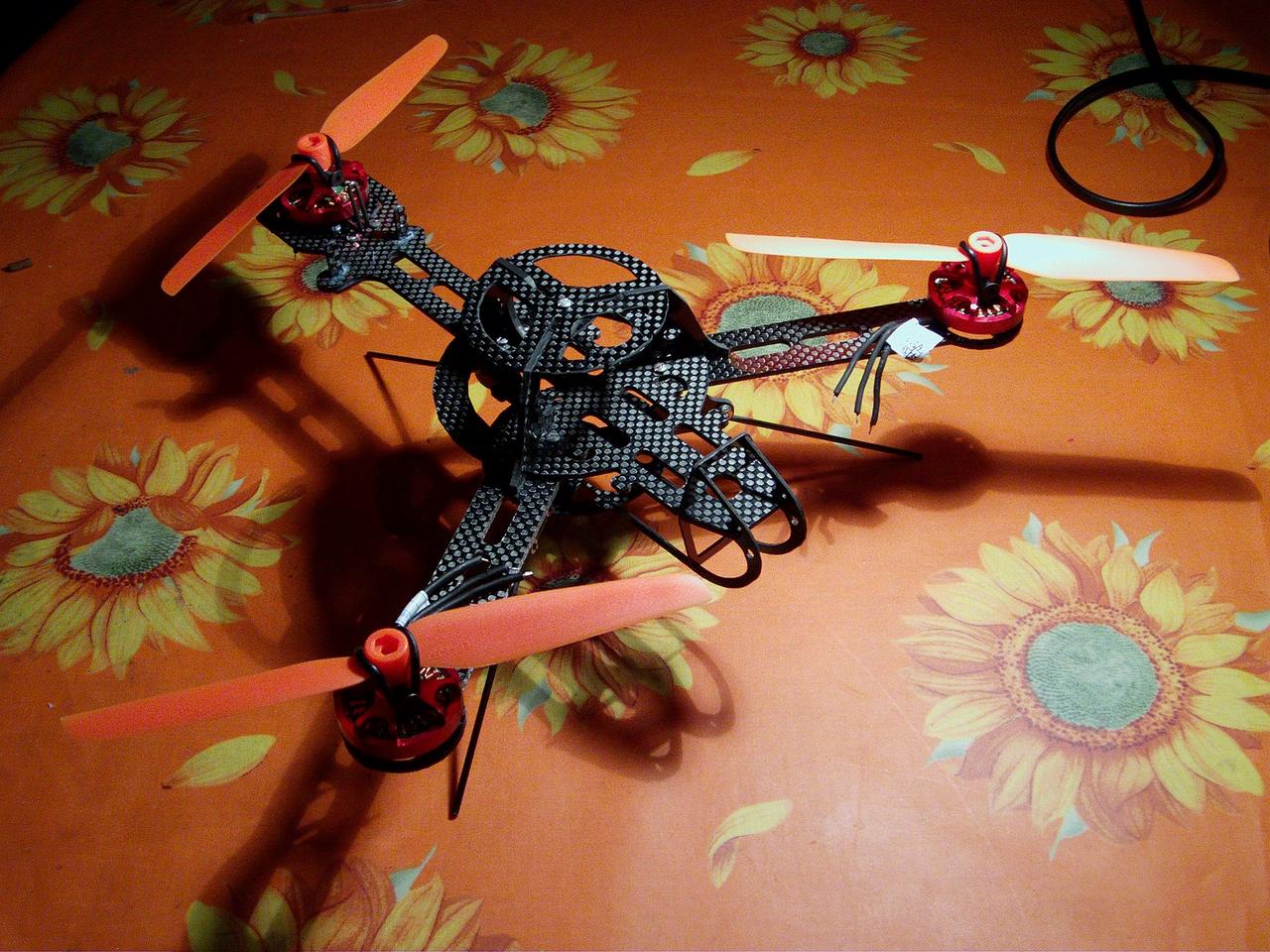
Non posso, l'incastro nella sezione centrale è possibile solo sotto, le 3 colonne verticali honno un'asola dove entrano le braccia.Originariamente inviato da blinking Visualizza il messaggio
Vedi la foto dell'attuale configurazione:
 Silvio. Se beccamo in volo!
Silvio. Se beccamo in volo!
(Non faccio consulenze private, se posso vi aiuto sul forum)
 Malato di multirotori dal 27 novembre 2008
Malato di multirotori dal 27 novembre 2008Commenta
-
non ci siamo capiti, ti proponevo di modificare solo i bracci terminali, quelli con l'incastro tipo puzzle.Originariamente inviato da crisiinvolo Visualizza il messaggioquota, velocità, idee: averne sempre almeno due
Commenta
-
Ma se costruissi solo delle "estensioni" che partono dalle attuali piastre motori per formare le Y?Originariamente inviato da crisiinvolo Visualizza il messaggioCommenta
-
Appena ho trovato un pò di tempo ho messo alla frusta la CNC!
Ecco il risultato:
Ho montato i motori ed i controller, da notare che le 3 coppie di motori sono differenti, a distanza di un anno hanno cambiato il disegno.
speriamo abbiano caratteristiche simili....
File allegatiSilvio. Se beccamo in volo!
(Non faccio consulenze private, se posso vi aiuto sul forum)
Malato di multirotori dal 27 novembre 2008Commenta
-
-
")
Che spettacolo complimenti
attendiamo un bel video
Commenta
-
Commenta
-
Ieri finalmente ho falshato il firmware x l'esa.
Dopo aver smadonnato per far armare la scheda, oggi mi sono reso conto che sbagliavo il movimento per armarla!
Per poter volare con la configurazione del mio esa ho dovuto montare la schedina ruotata di 90 gradi ed invertire alettoni ed elevatore. Ovviamente per armare il tutto ora il movimento è ruotato di 90gradi.
Ho fatto 1/2 batteria di test ed è un amore!
Prima avevo forti sbandate a destra ed a sinistra a causa dell'elica di coda ruotata per l'anticoppia che peró faceva anche traslare la macchina!
Il rumore dei 6 motorini è bellissimo, spero presto di mettere un video.File allegatiSilvio. Se beccamo in volo!
(Non faccio consulenze private, se posso vi aiuto sul forum)
Malato di multirotori dal 27 novembre 2008Commenta
-
-
La foto caricata da TapTalk è microscopica, la riposto....
Ora si che mantiene la prua, anche perchè ha molta più coppia a disposizione!
Devo dire che la differenza che più si nota rispetto l'elettronica tipo MK non è nel mantenimento dell'assetto, che bene o male si riesce a tenere, ma nella quota!
Devo lavorare molto di motore per compensare quando uso molto ciclico.
Qualcuno ha sperimentato con la curve del gas e con miscelazioni motore ciclico?
Appena convinco mia moglie ad assistermi faccio un flmantino in volo. File allegatiSilvio. Se beccamo in volo!
File allegatiSilvio. Se beccamo in volo!
(Non faccio consulenze private, se posso vi aiuto sul forum)
Malato di multirotori dal 27 novembre 2008Commenta
-
-
Seconda prova di volo:
Vista l'indisponibilità della mogli ho piazzato la telecamera fissa, ma anche la leggera brezza ha reso un problema tenerlo fermo nel campo inquadrato.... abbiate pazienza.
Poi il poco spazio a disposizione ed i pessimi pollici mi hanno fatto sudare non poco e perdere un'elica.
Ho creato 2 miscelazioni, alettoni sul colettivo ed elevatore sul collettivo.
Miscelati al 20% (i 2 comandi sono già ridotti al 50%) con switch di attivazione sul collettivo stesso.
Così quando si dà un forte comando di ciclico aumenta di poco il collettivo ed evita la brusca perdita di quota che avevo l'altro ieri.
Il switch evita che dia collettivo quando armo o disarmo i motori.
Un buon pilota di ely do farebbe d'istinto, ma io non lo sono!
Il suono dei 6 motori è un canto, hovering a meno di 1/2 gas quindi un po di pay load c'è.
Come per la configurazione tri ho delle oscillazioni quando è in hovering.
Se abbasso il guadagno per eliminarle perde velocemente la stabilizzazione e schizza da tutte le parti!
Devo montare qualche LED, ora è difficilissimo capirne l'orientamento!Silvio. Se beccamo in volo!
(Non faccio consulenze private, se posso vi aiuto sul forum)
Malato di multirotori dal 27 novembre 2008Commenta
-
Ascolta un cretino: non usare quelle miscelazioni, ti confondono soltanto e ti fanno abituare nel modo sbagliato.Originariamente inviato da crisiinvolo Visualizza il messaggio
Piuttosto imposta una curva motore più dolce nel punto di hovering così da permetterti un mantenimento di quota più facile e usa un po' di esponenziale (anche 35-40% all'inizio) sui comandi del roll e pitch.
Ho fatto anch'io dei microquad con le 6x4/5x3 e sono facilissimi, probabilmente con un filtro completo, come quello del codice multiwii, lo potresti settare molto meglio eliminando i problemi di oscillazione che hai adesso...Come per la configurazione tri ho delle oscillazioni quando è in hovering.
Se abbasso il guadagno per eliminarle perde velocemente la stabilizzazione e schizza da tutte le parti!
Johnny
(GTE - Torino)
Out of sight, NOT out of mind.Commenta
-
Hai l'ultimo firmware con lo scaling dei pot?Originariamente inviato da crisiinvolo Visualizza il messaggio
Comunque dovresti riuscire a diminuire un pò il gain, parliamo di aggiustamenti da decimo di mm sui pot.Commenta
-
Niente multiwii, cercerò di ottimizzare la KK.Originariamente inviato da jhoexp Visualizza il messaggio
Proverò la curva del gas, devo ritagliarmi un attimo in una giornata calma per provarlo in campo aperto.
Il firmware per l'Esa si ferma al 1.3, ho visto che per il quad sono arrivati all'1.5 se non sbalgio.Originariamente inviato da MarcAntonio Visualizza il messaggioSilvio. Se beccamo in volo!
(Non faccio consulenze private, se posso vi aiuto sul forum)
Malato di multirotori dal 27 novembre 2008Commenta
-
4.5 , che sarebbe simile all'1.5Originariamente inviato da crisiinvolo Visualizza il messaggio
Si infatti il software x esa è rimasto fermo.
Potresti provare con XXmulticopter, che ha continuato ad evolversi.
CMQ mi sorge un dubbio?
Per quale motivo il multiwii non dovrebbe essere compatibile con la KK?
L'atmega è lo stesso...
Certo bisognerebbe cambiare un pò gli output nel software per usare lo stesso hardware ma non vedo problemi a farlo.Ultima modifica di MarcAntonio; 28 marzo 11, 11:27.Commenta
-
Tra l'altro adesso sono supportati Gyro analogici, quindi possono essere usati quelli onboard alla kk.Originariamente inviato da MarcAntonio Visualizza il messaggio
E' da verificare/modificare solo la corrispondenza dei pin.Commenta


Commenta