Originariamente inviato da TermicOne
Visualizza il messaggio
-
Ottimo lavoro Luciano. Grazie.Giovanni -
Grazie mille Luciano.Originariamente inviato da TermicOne Visualizza il messaggio Sergio
Sergio
(GTE - Torino)Commenta
-
Ma allora hai l'originale e non quella di RC Timer (o forse si trova la custodia anche da qualche altra parte?).Originariamente inviato da QuercusPetraea Visualizza il messaggio
foto, foto!
ClaudioCommenta
-
Bella idea, ci stavo pensando invece della miriade di spinette che sto usando (saldatore e termoretrattile) ma non sono un elettronico e pensavo di usare una piastrina multifori sovrapposta su 4 colonnine di nylon in cui saldare le spinette ed i cavetti dai sottostanti molex e limare via le piste non utilizzate per evitare corti.Originariamente inviato da Sergei Visualizza il messaggio
Per l'alimentazione é meglio riimpiegare il BEC e da esso derivare il 5V comune a tutte le utenze oppure usarlo per la scheda e lasciare a questa la distribuzione a tutte le utenze?.
Il 3,3V serve solo per il vecchio GPS o ad altro?
Uno schemino mi aiuterebbe a capire dove collegare il BEC alla scheda (rimuovendo il jumper giallo?).
Ed anche una foto della piastrina /collettore.
Grazie a coloro che mi stanno aiutando nella conoscenza,
ClaudioCommenta
-
La FC è quella di RCTimer ma il contenitore è quello di diydrones http://store.diydrones.com/mobile/default.aspx#P940originale.Originariamente inviato da ClaudioALPHA21 Visualizza il messaggio
Inviato dal mio GT-P5110 con Tapatalk 2GiovanniCommenta
-
Allora io per l'alimentazione farei così dall' ESC o BEC esterno arriverei alla schedina millefori e da questa deriverei, in parallelo, tutte le alimentazioni 5V che occorrono.Originariamente inviato da ClaudioALPHA21 Visualizza il messaggio
Il 3,3V che utilizzo io è perchè mi sono sbagliato ad ordinare le schedine BT prendendo quelle a 3,3V quindi a te non serve.
Se poi vuoi fare un lavoro come ho fatto io saldi sulla schedina i fili, provenienti dai connettori molex, che ti necessitano e di qui parti poi per il gps, link 433 Mhz e chi piu ne ha ne metta.
Se alimenti la CRIUS con un BEC esterno devi togliere il ponticello giallo.
Come dicevo prima se dovessi fare nuovamente la schedina metterei anche il connettore USB medio o addirittura grande.Sergio
(GTE - Torino)Commenta
-
Region Of Interest - ROI
Con la nuova versione 2.9 R6 l'evento ROI purtroppo non funziona più come prima.
Se si mette un evento ROI il multicoso quando arriva a elaborare l'evento si gira un attimo verso la location specificata nel ROI e poi ritorna a girarsi verso il prossimo WP e se ne va allegramente continuando la missione come se nulla fosse.
Sembra essere un problema di Arducopter 2.9. Su DIYdrones Randy ha consigliato di provare mettendo il parametro YAW_OVR_BEHAVE a 1. In effetti con il parametro a 1 il ROI funziona nel senso che quando il multicoso arriva al ROI mantiene correttamente la prua verso il ROI ...peccato però che prima del ROI non c'è verso di far puntare la prua verso il prossimo WP.
...peccato...era una bella funzione...comunque in qualche modo, in attesa che la sistemino, si riesce comunque a fare qualcosa, rinunciando all'orientamento verso il prossimo WP.
LucianoCommenta
-
E mo cos'è il ROI ?")
Inviato dal mio GT-I9300 con Tapatalk 2Commenta
-
DO_SET_ROIOriginariamente inviato da saeli Visualizza il messaggio
MAV_ROI_NONE = 0: Yaw will hold it's current angle
MAV_ROI_WPNEXT = 1: Yaw will point at next WP
MAV_ROI_WPINDEX = 2: Yaw will point at the desired WP at the index #
MAV_ROI_LOCATION = 3: Yaw will point at the indicated location (The location in the command)
MAV_ROI_TARGET = 4: Not implemented
E' un evento che si imposta nella missione con Mission Planner o android.
Impostato a 3 fa in modo che il multicoso si muova, da quel momento in avanti, tenendo la prua verso il punto specificato nel ROI. Serve per poter, per esempio, mantenere inquadrato con la telecamera uno specifico target intanto che ci si muove con il multicottero verso waipoints intorno al target medesmo. Funziona(va) molto bene perchjè la rotazione è molto lenta e continua, senza scatti.
LucianoCommenta
-
Non sapevo che il ROI si potesse anche settare!Originariamente inviato da TermicOne Visualizza il messaggio
Con la 2.8R3 anche io l'ho provato con MP inserendo il punto bersaglio dal pannello del flight planner ed era divertente vederlo mirare mentre ci girava attorno ma funzionava nell'intervallo numerico fra i due WP precedente e seguente per cui lo dovevo mettere all'interno del percorso. Mi sarebbe piaciuto poter usare più punti per farlo ruotare attorno (non sarà mica il nuovo WPINDEX?) e non ho fatto in tempo a metterlo invece all'esterno per vederne il comportamento... sono stato interrotto dalle mie disavventure con la 2.9...
ma domani vedremo!
Claudio
PS
sei poi riuscito a capire come funziona e a cosa serve il menu Azioni di Flight Data?Commenta
-
Il ROI funziona tranquillamente con più punti. Una volta settato un roi per TUTTI i punti successivi il multicoso manterrà la prua verso il ROI. Se dopo il ROI setti tanti WP per far girare il multicoso intorno a un target dopo il ROI la telecamera sarà girata sempre al centro.Originariamente inviato da ClaudioALPHA21 Visualizza il messaggio
Il menu Azioni serve per inviare comandi al multicottero usando una 3DRradio o Xbee oltre a vedere i dati dei sensori su un grafico. Non l'ho mai usato davvero perchè non sono ancora riuscito a far funzionare la mia 3DRradio con un range decente (a 80-100 metri perde il segnale....uffa!)
...a proposito qualcuno ha fatto dei test di range con la 3DRradio di RCtimer?
LucianoCommenta
-
Ruggero - Footy ITA-61
Se ami il mare e la vela non andare mai alle Canarie in inverno con un trimarano che ha vinto la Route du Rhum (P.Pippoli)Commenta
-
Mega Planner Nuova Gestione?
Oggi piove e niente testOriginariamente inviato da TermicOne Visualizza il messaggio
Scusa se insisto sull'argomeno ROI ma non capisco come fare per settarlo da MP per più punti.
A me era sembrato che quando mettevo in mappa una serie di WP e poi decidevo con i relativi menù a tendina di specificarne le caratteristiche ed uno di essi lo definivo ROI, il puntamento valeva per la serie numerica contigua.
Mi spiego meglio: se ROI era il 4 i WP che lo guardavano erano il 3 ed il 5.
Forse con MP versioni successive é cambiato qualche cosa o ero io che mi sbagliavo?
Penso che la risposta interessi molti tuoi seguaci
ClaudioCommenta
-
Immaginiamo di aver pianificato una missione conOriginariamente inviato da ClaudioALPHA21 Visualizza il messaggio
1 - WP
2 - WP
3 - ROI
4 - WP
5 - WP
6 - WP
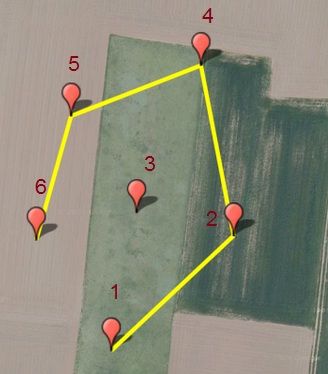
Il multicoso parte da 1 (WP) e va a 2 (WP). Quando arriva a 2 (WP) si gira verso il 3 (ROI) e intando che va a 4, 5 e 6 (tutti WP) tiene la prua sempre direzionata verso il 3 (ROI)....questo è come funzionava con la 2.8.
Ora con la 2.9 non funziona più. Se invece metti YAW_OVR_BEHAVE=1 allora il multicoso fino a 2 (WP) tiene la prua come cavolo vuole lui (devo capirne ancora la logica) ma appena arriva a 2 (WP) si gira miracolosamente verso 3 (ROI) e si fa tutto il giretto successivo per 4, 5 e 6 inquadrando sempre 3 (ROI)...come faceva una volta.
...l'argomento comunque è da approfondire...quando smette di piovere...
LucianoCommenta
-
Problema di pitch violento. Cosa fare?
Ciao, mi inserirsco in questa discussione con un nuovo problema. Sono alle prime prove con l'esacottero. Ho regolato i pid avendo, tutto sommato, un buon risultato ma ho un grosso problema, quando inclino il veicolo in avanti o indietro ha reazioni brusche. Tutti gli altri movimenti sono morbidi. Allego video:
Come dovrei agire?
Grazie
Massimiliano
Conf:
Crius 2.0
MegaPiratesNG 2.9 R6Commenta

Commenta