-
-
Breve ricerca mattutina sulla disponibilità della Teensy 3.1 in Italia:
Robot-Italy
Robot-Domestici
Lista distributori in Europa:
Official DistributorsGiovanniCommenta
-
Buongiorno al 3D e complimenti ai ragazzi per l'iniziativa, molto interessante a mio avviso.
poter avere alcune info a scelta sul display radio mi sembra importantissimo, e vorrei chiedere se sarà possibile implementare il sistema anche su questo tipo di configurazione :
radio turnigy 9x con firmware originale
.jpg)
moduli frysky con telemetria

FrSky FLD-02 Telemetry Display Screen collegato alla radio

che attualmente utilizzo per avere la tensione batterie e la qualità del link radio.Commenta
-
Non è escluso che si possa fare. Il protocollo del modulo frsky è lo stesso del protocollo dell'hub e penso si possa usare arduino pro mini.Originariamente inviato da ziofico Visualizza il messaggio
Telemetry to Turnigy 9X (with FrSky FLD-02 Telemetry Display Screen) - DIY Drones
Vi sono altri progetti per utilizzare i messaggi mavlink sui moduli frsky+display e ricevitori serie D.
https://www.indiegogo.com/projects/mavboard
jD-IOBoard v1.1, MCU controlled IO Board for driving LEDs, Relays, Servos, che può gestire LED strip, relè e servo; il codice è qui.GiovanniCommenta
-
Ho letto di un progetto che lavorava esclusivamente su ER9x.. (edit - mi sa che è il primo indicato da quercus)
Ma perchè vuoi tenerci il fw originale sulla 9x?
E' stata fatta apposta per craccarla ;-)Commenta
-
Allora
dopo 4 ore di smadonnamenti ce l'ho fatta.
Tra l'altro era più di mezz'ora che stavo scrivendo un post qui dicendo che non ce l'avevo fatta, poi sono andato a rileggere qui
Apm-mavlink-to-frsky
ed al punto
"Sharing UART0 with 3DR radio
This way you always have to connect with the 3dr radio to get data to the Taranis but you dont have to modify the code and build arducopter yourself. Here is one way to connect the arduino to the uart0 port to share the TX line with the 3dr radio. you can also split the TX line from the telemetry port of the APM. "
mi sono illuminato...
Praticamente ce l'avevo fatta a flashare arduino mini pro (dopo svariati tentativi ce l'ho fatta con un ftdi che aveva anche il cavo x reset..)
e lui si avviava all'accensione dell'APM (led verde che lampeggia molto veloce)
Ma non mi dava i dati di telemetria
POI ho scoperto che i dati te li dà SOLO se in contemporanea hai ANCHE le radio Tx/Rx della telemetria collegate e CONNESSE tramite Mission Planner!!
Altrimenti NIET!
Quindi confermo, funziona (ma è un po' ridondante a questo punto...) che tanto comunque al campo vado con andropilot che con la sua bella vocina mi avverte se mi sto cacciando nella me...a...
Una cosa strana, ho preso il sensore di voltaggio FrSKY quello semplice fatto da 4 resistenze in croce che misura il voltaggio totale
L'ho attaccato al GND e AD2 della Rx ma non mi dà valori.
Ho misurato all'uscita (quella che va alla RX) ed il voltaggio è 1.96 e dovrebbe circa essere giusto o no? Ho letto che max dovrebbe essere 3.6V..
Avete idea del perchè?
Denchiu
pCommenta
-
Teensy: MAVLink su telemetria FrSky via SPort
Eccomi con le ultime novità.
Mi è arrivata la scheda di sviluppo Teensy, che ho acquistato in Germania da EXP-TECH ed arrivata in tempi record, e dopo aver preparato l'ambiente di sviluppo integrando nell'IDE di Arduino l'add-on TeensDuino, ho lanciato la compilazione e caricato l'eseguibile sulla scheda.
Per prova ho utilizzato il quadri che monta VRBrain 4.0, ma l'hardware e software funzionano anche su APM 2.5/6, PixHawk/FixHawk e AIPro V2 con MegaPirateNG.
Funziona a meraviglia ma a differenza dell'altro progetto, in questo si deve eliminare il radiomodem classico che viene sostiruito dalla Teensy per inviare i dati sulla Taranis. Quindi non serve effettuare una connessione MAVLink con Mission Planner, in quanto il firmware di conversione dei protocolli si occupa di stabilire la connessione come fosse lui MP. Questa scelta implica che non è possibile avere in contemporanea radiomodem e telemetria FrSky e questo potrebbe essere noioso se si volesse utilizzare applicazioni come VRPad Station o Andropilot.
Comunque sul display della Taranis è possibile visualizzare, come indicato nel codice, i seguenti parametri
ed esemplificati nelle immagini dell'autore del progetto.codice:This is the data we send to FrSky, you can change this to have your own set of data ****************************************************** Data transmitted to FrSky Taranis: Cell ( Voltage of Cell=Cells/4. [V] This is my LiPo pack 4S ) Cells ( Voltage from LiPo [V] ) A2 ( Analog voltage from input A0 on Teensy 3.1 ) Alt ( Altitude from baro. [m] ) GAlt ( Altitude from GPS [m]) HDG ( Compass heading [deg]) Rpm ( Throttle when ARMED [%] ) AccX ( AccX m/s ? ) AccY ( AccY m/s ? ) AccZ ( AccZ m/s ? ) VSpd ( Vertical speed [m/s] ) Speed ( Ground speed from GPS, [km/h] ) T1 ( GPS status = ap_sat_visible*10) + ap_fixtype ) T2 ( ARMED=1, DISARMED=0 ) Vfas ( same as Cells ) Longitud Latitud Dist ( Will be calculated by FrSky Taranis as the distance from first received lat/long = Home Position ******************************************************
Come ultima prova ho collegato in cascata sul bus S.Port della X8R il sensore di tensione FLVSS e la Teensy 3.1 innestata sul secondo connettore del sensore FLVSS. In questo modo ho sulla telemetria della Taranis anche i valori delle singole celle delle LiPo.
Ora sto scrivendo un documento, che pubblicherò spero a breve, con le istruzioni dettagliate per mettere insieme l'ambaradam.
Stay tuned.... Giovanni
GiovanniCommenta
-
Quindi non è come per la d4r-ii che hai l'obbligo di attaccare anche il radio modem..
Inviato dal mio GT-N7100 utilizzando TapatalkCommenta
-
No. Qui hai l'obbligo di tirarlo via; devo provare se utilizzando il radiomodem e collegando la sola linea RX del teensy si può avere sia i cavoli che le capre.Originariamente inviato da pieri70 Visualizza il messaggioGiovanniCommenta
-
Esatto,Originariamente inviato da QuercusPetraea Visualizza il messaggio
Per farli funzionare in contemporanea colleghi solo RX della teensy, come si fa per il miniosd quando hai anche il radiomodem, testato e funzionante, anche con controprova.
L'importante è che ci sia almeno un utilizzatore che "richieda" la tlm alla CB, sennò da sola non ne vuole sapere di uscire, un pò timida la ragazza...
C'è anche una modifica al codice per far uscire il modo di volo, nella lunga discussione su dydrones è riportata.
MemeUltima modifica di ZioMeme; 16 settembre 14, 07:14.Commenta
-
Cosa strana però
perchè con la D4R-II devi comunque attaccare Tx e RX ma se non metti i radiomodem col piffero che ti esce il dato telemetrico verso la taranis..
Commenta
-
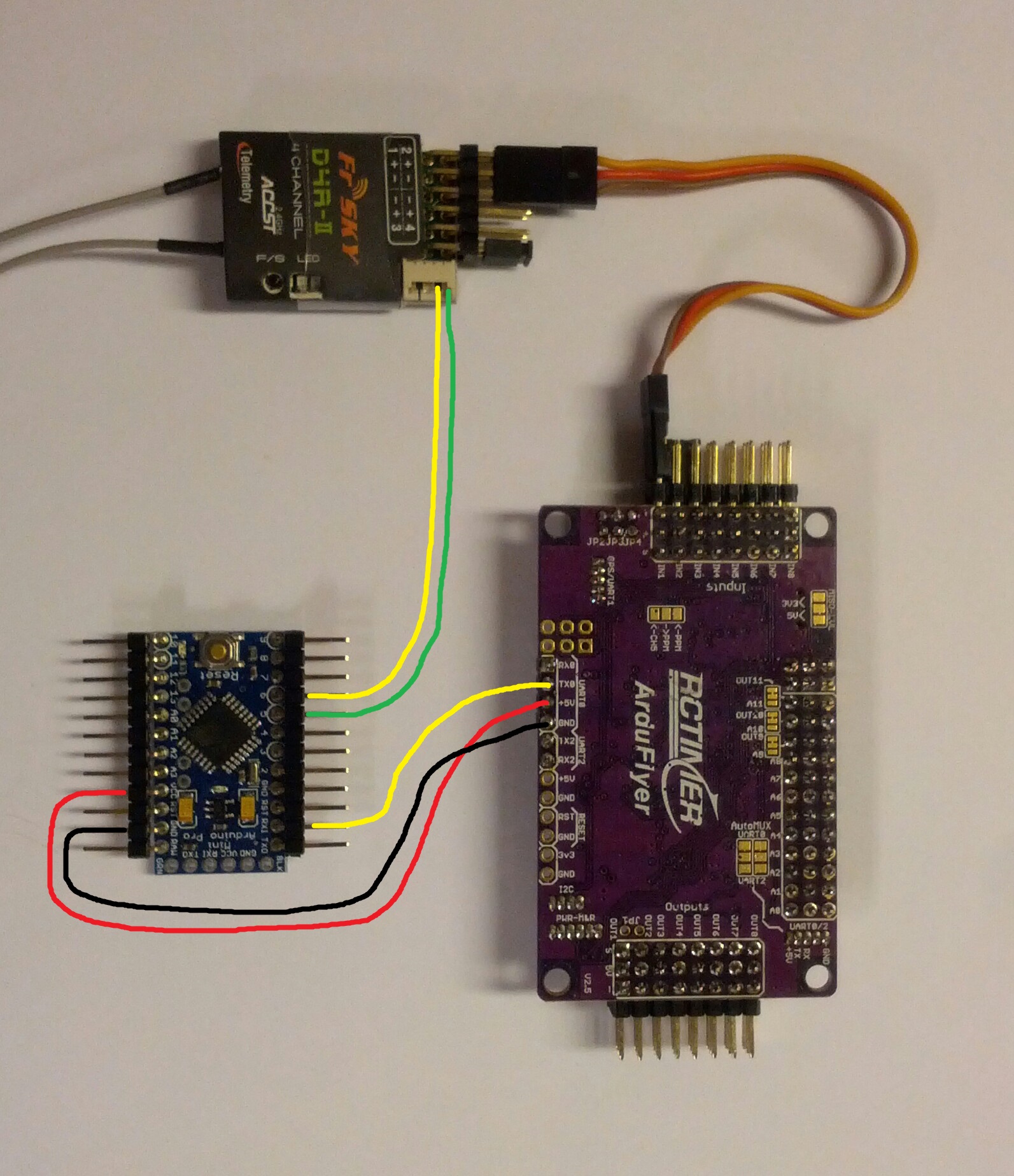
Sulla schedina Arduino mini hai due seriali; una è hardware ed è collegata alla UART della telemetria ed una è software (a 9600baud). Il problema non è sui segnali Tx/Rx verso la D4R ma sui segnali che vanno verso la APM. Con questa soluzione, utilizzare la UART0, si utilizza solo la linea Rx che ascolta i messaggi MAVLink; se non c'è una connessione coi radiomodem e mission planner questi messaggi non vengono inviati con la conseguenza che la mini non sente nulla.Originariamente inviato da pieri70 Visualizza il messaggio
Se fosse possibile attivare la UART2, come propone l'autore, allora si potrebbero usare entrambi i segnai Tx/Rx ed emulare la connessione radiomodem senza averli fisicamente connessi.
E' la situazione opposta alla soluzione con Teensy che fa finta di essere il radiomodem connesso a MP. Se guardi questa immagine puoi notare che la Teensy si connette direttamente al connettore della telemetria. Potrebbe essere interessante provare la stessa cosa con la mini.
http://api.ning.com/files/rpTO7xq7Ss...KF3AyuSL/2.jpgGiovanniCommenta
-
Orpo, vero, ho guardato i due filetti che vanno alla RX, non il singolo che va alla APM..
Pardon!Commenta
-
Teensy: MAVLink su telemetria FrSky via SPort
Il progetto è stato messo uffcialmente su github. Ora è possibile modificare il codice per le proprie esigenze come, ad esempio, utilizzare in contemporanea ai dati forniti dalla telemetria MAVLink anche i dati provenienti da sensori ufficiali FrSky. Visto che ora uso il sensore FLVSS, è possibile escludere dal codice la lettura della tensione della batteria ed utilizzare quella fornita dal sensore LiPo di FrSky.
Basta commentare nel file FrSkySPort.h il sensore che vogliamo escludere.
Come promesso, ecco la documentazione che illustra come utilizzare la Teensy.codice:// To disable a specific sensor, just comment out the sensor_id define (place // first on the line defining the sensor id) #define SENSOR_ID_VARIO 0x00 // 0 //#define SENSOR_ID_FLVSS 0xA1 // 1 Sensore escluso #define SENSOR_ID_FAS 0x22 // 2 #define SENSOR_ID_GPS 0x83 // 3 #define SENSOR_ID_RPM 0xE4 // 4 #define SENSOR_ID_SP2UH 0x45 // 5 #define SENSOR_ID_SP2UR 0xC6 // 6
Spero sia abbastanza chiara.
https://docs.google.com/document/d/1...it?usp=sharingGiovanniCommenta
-
Complimenti, ottimo lavoro! La differenza tra la genialità e la stupidità è che la genialità ha i suoi limiti. Albert Einstein
La differenza tra la genialità e la stupidità è che la genialità ha i suoi limiti. Albert EinsteinCommenta
-
Accedi o registrati
- Accedi con
Commenta