Grazie mille Liftbag sei moooolto compotente in materia.
Ora provo a scaricare la BLHeliSuite.
Ciao e ancora grazie.
-
Preciso subito che non ho mai usato la gui di OlliW. Credo che sia quasi sempre in ritardo sugli aggiornamenti e che BLHeliSuite sia decisamente più completa in tutto, sebbene OlliW ha forse avuto il merito di essere stato il primo a creare una AVRbox.Originariamente inviato da Creative Visualizza il messaggio
Il firmware che usi tu (10.4) è parecchio datato, siamo alla 11.2.07 ed in vista della revision 12.
Se OlliW's BLHeliTool non ti fa aggiornare alla 11.2.07 ti consiglio di passare a BLHeliSuite.
1) Lo Startup Method era selezionabile nelle vecchie versioni Multi del fw tra Spepped e Direct.
Lo Stepped è preferito con gli elicotteri, dove non c'è bisogno di avvio rapido, ed ha parametri che definiscono sia la potenza inviata nello spool-up, sia l'accelerazione.
E' impostante negli elicotteri per creare un avvio dolce che non faccia scodare il mezzo.
Con i Multi, si preferisce il metodo Direct e con i fw attuali è l'unico metodo possibile con i multi, perchè molto rapido, anche se tecnicamente difficile da realizzare.
E' qui che SimonK a parer mio è ancora un gradino avanti, perché BLHeli ha talvolta qualche incertezza in più (anche se non tale da fallire l'avvio).
2) Demag compensation è un parametro che velocizza la smagnetizzazione degli avvolgimenti dei motori ad induttanza elevata, quali sono quelli di tipo pancake.
Dovrebbe aiutare a migliorare il sincronismo, soprattutto quando il regenerative braking è attivato.
Nella mia esperienza con motori piccoli e medio piccoli, anche se di tipo pancake, ho rilevato un acuirsi dei problemi di sync con demag on.
3) Il Gain della scheda Setup Advanced è la quantità di segnale inviata al motore in rapporto al segnale di ingresso. Si tiene sempre a 1.00, salvo rari casi.
Ad esempio, per non bruciare un motore di coda 1S per un mCP X dove l'alimentazione è 2S, è utile abbassare il valore a 0.50, in modo che al motore arrivi la metà dell'impulso, dove la metà con tensione raddoppiata corrisponde all'impulso pieno con lipo 1S.
4) Il Beacon è una utilissima funzione che serve a ritrovare un velivolo disperso.
Funziona con l'emissione continua di beep sonori dal motore.
Il Delay è il ritardo col quale si attiva da quando il motore si spegne.
Strenght è ovviamente il volume sonoro del beep emesso.
5) Input PWM polarity deriva dalla prima motivazione che ha portato a BLHeli.
Prima del FW di Steffen, i modders di microelicotteri (perditempo che avevano come mission insegnare a Blade Helis che i microelicotteri potevano essere brushless) usavano un convertitore PWM to PPM, il mitico TheSteve, per trasformare un segnale di comando di un motore brushed in un segnale adatto agli ESCs ordinari.
Sebbene Walkera avesse già usato ESCs che capivano il segnale brushed, Steffen ha creato un codice in cui durante l'armemento l'ESC capisce se si è in presenza di un segnale per motori brushed o se si tratta di un segnale tipo servo.
Poiché prelevare il segnale all'uscita per il motore brushed era quasi sempre problematico per via del condensatore in uscita, spesso si prelevava il segnale dal gate del mosfet di potenza. Ma il segnale lì è invertito, ecco perché è possibile selezionare negative.
6) Damping force è la quantità di frenatura del motore durante la sua decelerazione, e funziona ovviamente se il Damping Mode (o il Light Damped) è attivato, mentre è ininfluente con Motor PWM Frequency High o Low.Lascia un commento:
-
Siete troppo avanti
Grazie per questa interessante condivisione
Sono curioso della prova con gli afro!Lascia un commento:
-
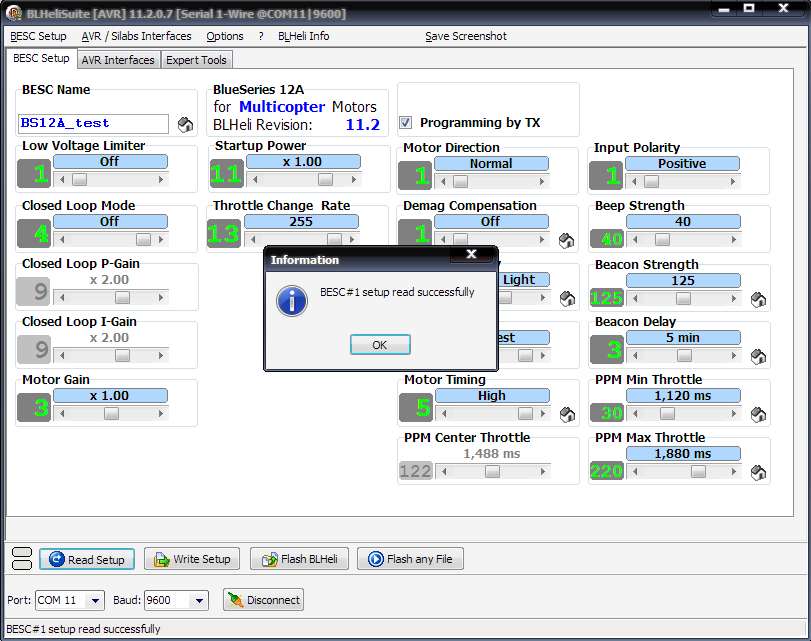
Ciao Liftbag, senti, sapresti spiegarmi brevemente nelle due foto allegate cosa fanno i seguenti parametri?
Prima foto:
1)Startup method
2)Demag compensation
3)Gain
4)Cos'è il beacon e i suoi parametri
Seconda foto:
5)Input PWM polarity
6)Damping force
Ora, quello che vorrei capire è se le oscillazioni che tormentano il mio modello di tricottero durante il volo da medo-bassa ad alta velocità posso dipendere anche dalla regolazione degli ESC perché sulla scheda KK le ho già provate tutte....
Ciao e grazie.File allegatiLascia un commento:
-
-
Arduino 1-wire interface
Un'altra interfaccia decisamente semplice per comunicare con un ESC BLHeli è quella basata sulla scheda Arduino Nano.
Questo tipo di interfaccia non comunica con un ESC con bootloader Simonk.
Deve quindi essere stato preventivamente flashato con kazzillo e USBASP avendo cura di scegliere P2D (Servo Cable) quando BLHeliSuite aprirà la finestra di scelta del bootloader.
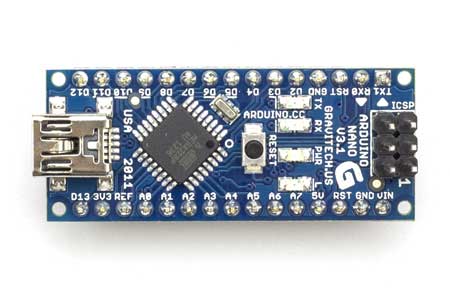
Il bello di questa interfaccia è che si realizza in pochi secondi senza toccare il saldatore.
Questa interfaccia può comunicare unicamente con ESCs dotati di bootloader tramite la spina molex del bec.
In teoria il filo rosso centrale del molex andrebbe tolto, ma per ora, con esc che hanno il BEC a 5V, non ho mai avuto problemi a lasciarlo. Se lavorate su un ESC con BEC ad alto voltaggio, togliete il filo rosso.
La sua programmazione è estremamente semplice.
Si installano sul PC windows i driver per Arduino (se non sapete come fare leggete qui).
Una volta che l'hardware è correttamente riconosciuto e la porta COM è stata creata (prendete nota del numero), aprite BLHeliSuite e dal menu AVR / SiLabs Interfaces scegliete AVR USB/Serial Bootloader Interface.
Aprite la scheda AVR Interfaces e dall'elenco a discesa scegliete Nano w/ ATmega328.
Come porta COM assicuratevi di scegliere quella creata durante l'installazioni di arduino nano (di sicuro non è la COM1). La velocità della porta va bene a 57600 Baud (se avete problemi abbassatela).
Ora cliccate su Make Arduino 1-Wire Interface e dite si alla finestra di dialogo di conferma. Pochi secondi è l'interfaccia è pronta.
Per utilizzarla la procedura è questa.
- Andate nella scheda BESC Setup, selezionate la porta COM corretta in basso a sinistra e come velocità non andate oltre i 19200 baud.
- Tenete a portata di mano l'ESC e la batteria per alimentarlo.
- cliccate su Read Setup e non appena appare questa finestra di attesa...

...collegate la spina molex come in questa foto (batteria scollegata).
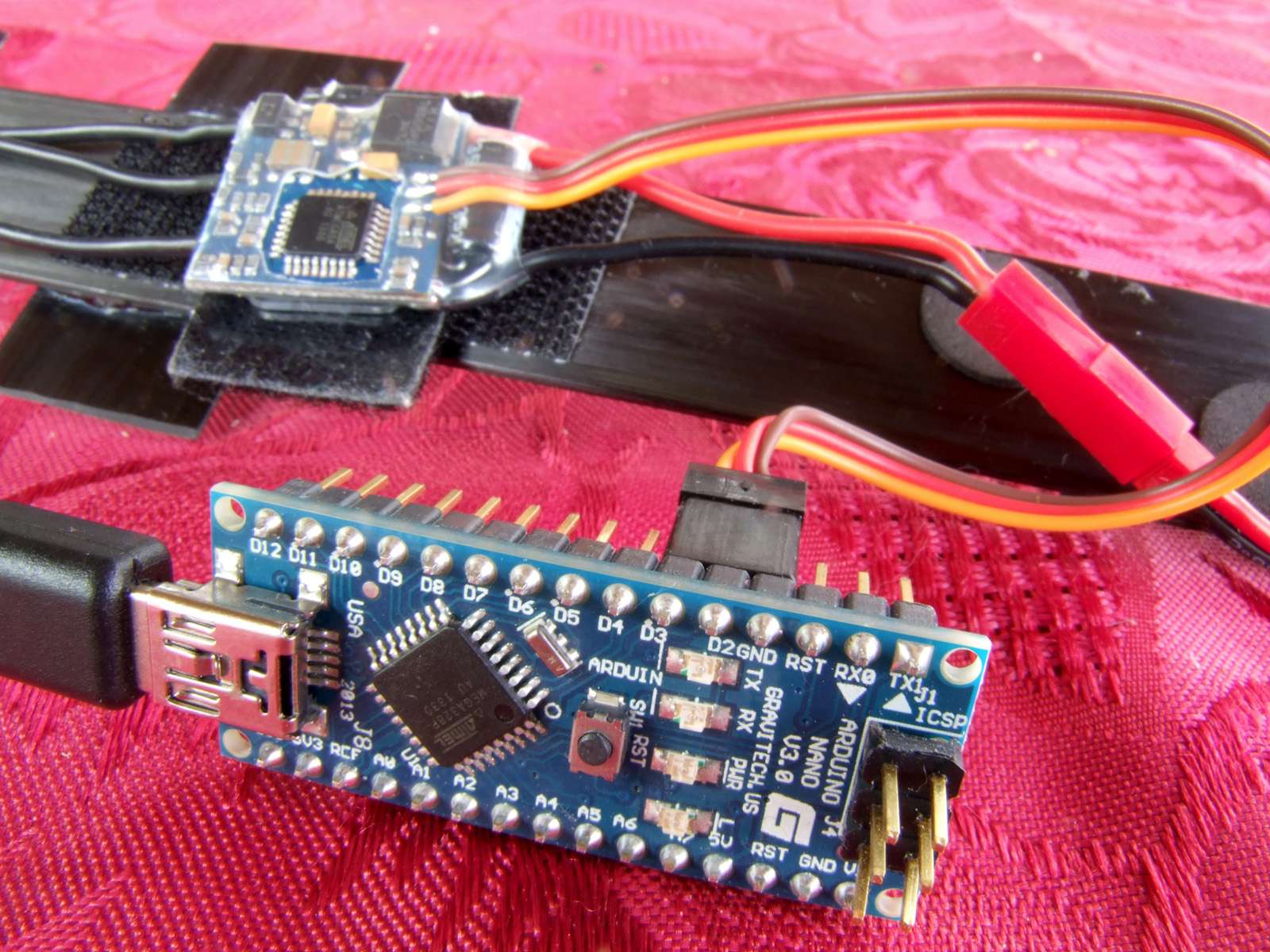
Questa operazione avvia il bootloader che prepara l'esc alla comunicazione attraverso il filo del segnale (il connettore potete collegarlo anche prima di cliccare Read Setup).
- Subito dopo, attaccate la batteria, la gui vi comunica la corretta lettura.
- Staccate la batteria.
- ogni operazione richiede lo stacco ed il riattacco della batteria all'esc, cioè, se volete modificare dei parametri, a batteria scollegata li impostate nella gui, poi cliccate Write Setup e quando appare la finestra Please connect BESC... collegate la batteria.
Achim mi ha confermato che nella versione 12, ormai imminente, sarà possibile programmare una scheda Arduino UNO con LCD shield come box stand alone, per poter variare i parametri sul campo anche con ESC basati su Atmel.Lascia un commento:
-
Grazie liftbag spiegazione molto chiara... quando ho un po' di tempo ci provo.Lascia un commento:
-
Arduino UNO BLHeli BOX
Se possiamo, cerchiamo di raccogliere qui le informazioni.Originariamente inviato da Creative Visualizza il messaggio
Io ho usato un SainSmart Graphic LCD4884 Shield.
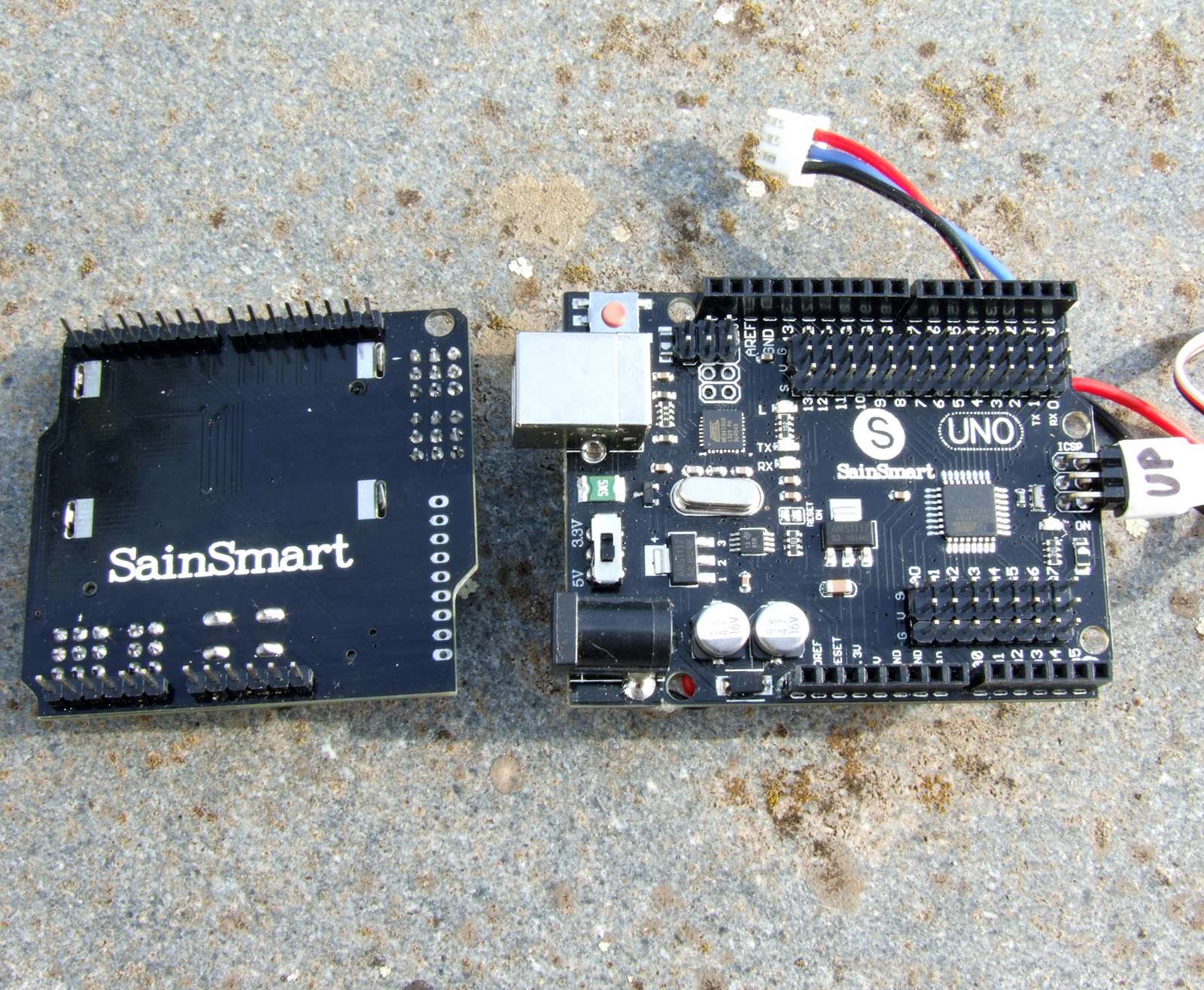



Creare la box è facilissimo.
Si installano i driver di arduino sul pc windows, si avvia BLHeliSuite.
Dal menu AVR / SiLabs Interfaces si sceglie Silabs Serial Interface.
Si entra nella tab Serial Interfaces Boxes, questa è la schermata.
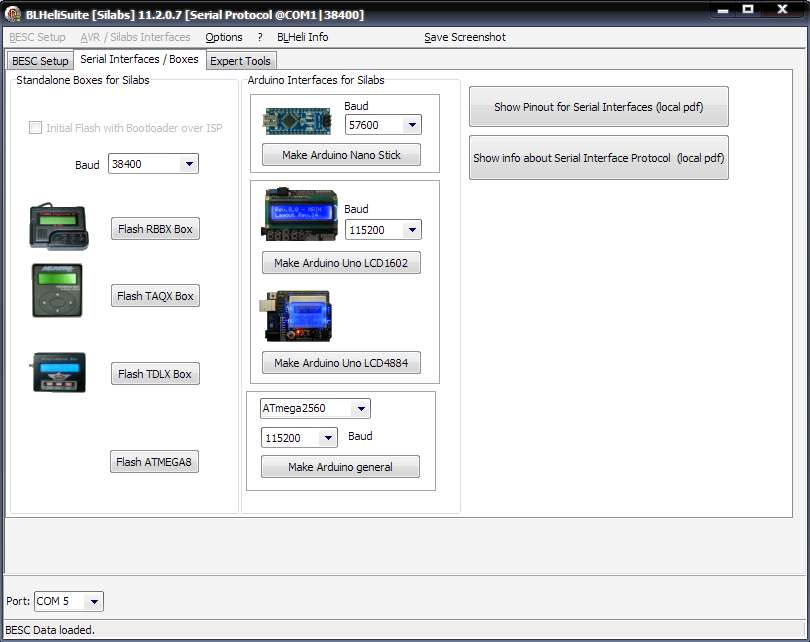
Si clicca su Make Arduino Uno LCD4884.
Appare questa finestra
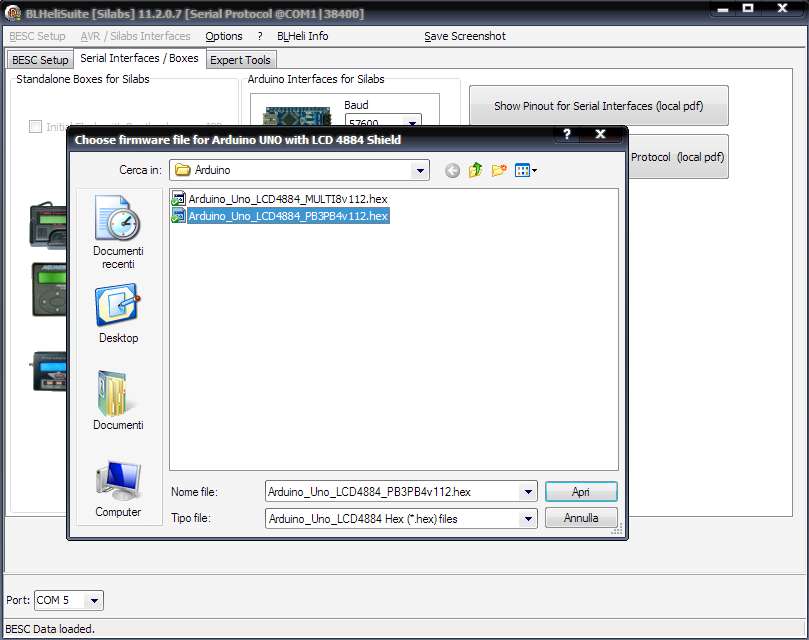
La versione multi è quella che abilita la scrittura in parallelo su più ESCs.
Io ho sempre usato quella evidenziata.
Dopo la scelta, pochi secondi e la box è pronta.
Collegata all'usb del pc, diventa una Silabs Serial Interface che tramite la GUI consente di flashare e regolare i parametri dell'esc.
Alimentata in proprio e staccata dal pc, si usa per scrivere i parametri sull'ESC, navigando i menu con il joystick dello schermo LCD.
Tutto quanto sopra è attualmente appannaggio degli ESCs basati su SiLabs.
Dalla prossima versione di BLHeliSuite, pare sarà inserita la programmazione di una BOX per ESCs basati su Atmel.Lascia un commento:
-
Mi interessa sta cosa... dove posso trovare maggiori informazioni a riguardo...grazie.Originariamente inviato da liftbag Visualizza il messaggio
Inviato dal mio GT-S5830i con Tapatalk 2Lascia un commento:
-
QBrain 4in1 20 Ampere
No, usbasp si usa per gli Atmel.Originariamente inviato da birrozza Visualizza il messaggio
Per i SiLabs si usa o il SiLabs toostick opportunamente modificato, oppure quasi tutte le board arduino, programmate tramite la GUI di Achim.
Il vantaggio di una Arduino UNO è che collegandogli una shield LCD è possibile usarla sia come interfaccia pc per il flashing, sia per variare al volo i parametri sul campo, lontani dal pc. L'altro vantaggio è che si può usarla per flashare e regolare i parametri in parallelo sui 4 esc.
Devi però saldare i quattro cavetti sul tuo ESC 4 in 1, uno per ciascun esc, e devi anche conoscere quale file hex è adatto.Lascia un commento:
-
QBrain 4in1 20 Ampere
Seguo con interesse questo nuovo tharead poiché sul mio quad monto un esc 4in1 QBrain da 20 Ampere.
In passato ho fatto una ricerca ed ho visto che questo tipo di esc supporta come firmware solo il BLHeli.
Chiedo: per poterlo programmare è necessario un programmatore Arduino Uno o posso usare anche un programmatore USBasp AVR?
Aliexpress.com : Buy FREE SHIPPING 1LOT New USBASP USBISP AVR Programmer USB ATMEGA8 ATMEGA128 Support Win7 64K from Reliable usb atmega128 suppliers on Kesun ElectronicsLascia un commento:
-
PID e regenerative braking
No, non comportano inaffidabilità, se la centralina è impostata per non spegnere mai i motori in volo.Originariamente inviato da xxxnt Visualizza il messaggio
E anche in caso, non mi è ancora capitato che in avvio un motore fallisca.
Soltanto, qualche volta vedi l'elica fare qualche grado a rovescio e poi partire.
Si, uno dei vantaggi spesso citati del regenerative braking, è quello di riuscire ad aumentare i PID rispetto a damped off.
I pid si tende sempre ad aumentarli fino all'innesco dell'oscillazione per poi tornare indietro di poco per eliminarla.
L'oscillazione arriva perché nel momento che la centralina dice "ok, hai raggiunto la posizione, ora fermati", il motore frena per inerzia, quindi con una curva di discesa lenta, quindi sovra-corregge e la centralina da comando opposto per rimediare, con ciclo smorzato fino al raggiungimento della rotazione (del multirotore) voluta.
Allora per evitare l'oscillazione, abbassiamo il PID per ridurre l'aggressività del comando o della correzione al punto che la decelerazione non sia tale da andare in sovra-comado/correzione.
Ecco perché migliorando la frenatura è possibile aumentare l'aggressività della risposta senza incorrere in eccessi di correzione.
Per questo motivo, tendo a credere che anche senza variare i pid, il regenerative braking possa migliorare la sensazione di locked-in in situazioni di vento o turbolenza.Lascia un commento:
-
Closed Loop
Questa funzione non è una novità, in quanto è usata già negli ESCs Autoquad ESC32.Originariamente inviato da lucasss Visualizza il messaggio
Si tratta di una sorta di governor, quindi un modo di funzionamento dove il regime di rotazione è controllato e comparato per essere mantenuto costantemente agganciato al segnale di ingresso sull'esc.
Mentre il governor negli elicotteri è concepito per mantenere un regime costante fisso, il multi rotor closed loop ha come priorità il raggiungimento del nuovo regime di rotazione nel più breve tempo possibile, sia accelerando che decelerando.
E' quindi inteso che va usato col regenerative braking, quindi prima di sperimentarci su, bisogna regolare a puntino il damped mode.
Il vantaggio del closed rispetto all'open loop sta in RPMs indifferenti alle variazioni di carico e in una ancora più veloce risposta in accelerazione.
Essendo un governor, dispone dei controlli P e I gain, da regolare fino ad eliminare le oscillazioni nel regime di rotazione.
Quella che trovo una limitazione, è la suddivisione in step del range di giri ottenibili in relazione al segnale di ingresso, da usare a seconda dei massimi giri raggiungibili dal motopropulsore.
Questa suddivisione in pochi step, fa si che scegliendo un valore più basso di quello corretto, il motore non raggiunge i massimi giri che potrebbe, scegliendo quello corretto, è possibile notare che il raggiungimento dei max rpm avviene sensibilmente prima del massimo segnale in ingresso, cosa che riduce la risoluzione del segnale di ingresso.
Ma sono valutazioni teoriche campate in aria, in quanto non ho ancora mai provato a volare con il closed loop abilitato.Lascia un commento:
-
Queste incertezze in avvio che si notato con Blheli e che io non ho mai notato con Simonk, non compromettono in alcun modo il volo? Sia in volato tranquillo che volato acro, difficilmente si scende sotto il 10-15% di gas.Originariamente inviato da liftbag Visualizza il messaggio
Con il regenerative breaking in modalità "light" o "full damped" mi dicevi invece che si riescono ad aumentare i Pid in maniera considerevole e questo mi fa pensare ad un miglior comportamento del mezzo nel vento e/o per gli acro.
Ho 5 esc multistar 15A...usati sempre con firmware stock senza problemi, potrei fare un pò di prove con firmware stock-simonk-blheli e capire effettivamente cosa cambiaLascia un commento:


")
Lascia un commento: