Originariamente inviato da rodolfo70
Visualizza il messaggio
Comunque manual non è da usare con i multirotori, probabilmente si usa con gli aerei.
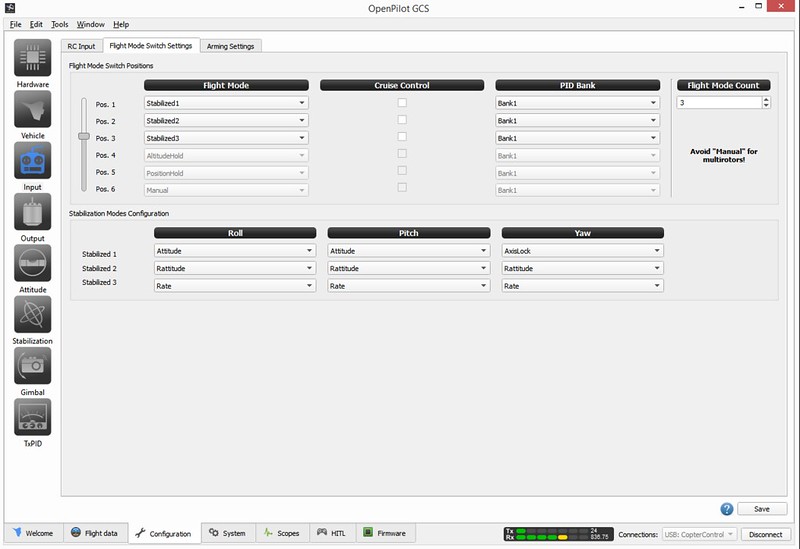
La modalità manuale si ottiene assegnando il comportamento rate a tutti e tre gli assi di rotazione (jaw può anche essere axis lock, ma non attitude che non ha molto senso sul timone).
Quindi i set di impostazione Stabilized 1 2 e 3 non significano necessariamente un comportamento autostabile.
Ad esempio, potresti assegnare a Stabilized 1 il comportamento Attitude per pitch e roll per avere un comportamento autostabile, Rattitude in Stabilized 2 per un comportamento acrobatico autolivellante con stick al centro, e Rate in Stabilized 3 per avere la modalità acro pura.
Poi puoi assegnare alle tre modalità di volo i tre bank di regolazioni pid, ciascuno ottimizzato per gli scopi di quella modalità di volo.

 , 10' fà ho provato all'aperto e devo dire che è uno spettacolo, è vero che regala una sensazione diversa dalle altre fc che ho provato, con la naza V1 se davo tutto gas per fare una salita in verticale, tirava da una parte o dall'altra(avevo pensato ad un cedimento delle lipo), adesso con la cc3d se do tutto gas sale dritta senza tentennamenti o esitazioni e in più ha molto più brio di prima
, 10' fà ho provato all'aperto e devo dire che è uno spettacolo, è vero che regala una sensazione diversa dalle altre fc che ho provato, con la naza V1 se davo tutto gas per fare una salita in verticale, tirava da una parte o dall'altra(avevo pensato ad un cedimento delle lipo), adesso con la cc3d se do tutto gas sale dritta senza tentennamenti o esitazioni e in più ha molto più brio di prima


 PP
PP

Commenta