Buonasera utenti di Baronerosso.it, oggi purtroppo sono qui per tentare di far decollare il mio drone.
CARATTERISTICHE:
Frame: DJI F450
Motori: Brushless A2212/13T 1000kv
ESC: 30A (abbinati ai motori, non hanno marca)
Eliche: 10x4.5
FC: Arduino UNO R3 + Firmware MultiWii 2.4
IMU: GY 80
LiPo: Zippy 8000mah 3S 11.1V 30C
RC: Fly Sky FS-T6 impostata in mode 2 (a giorni mi arriva la Turnigy 9X)
("Ci sono schede di volo meno costose dell'arduino e più semplici da configurare-Ci sono droni già pronti a poco per i neomodellisti"
Frasi lette in milioni di post, ma in casa avevo questo e non posso nè spendere altri soldi, nè voglio lasciarlo a marcire e poi se non mi complico la vita non ci trovo piacere )
)
Vi spiego quindi il mio problema in cosa consiste precisamente:
Qualche giorno fa, dopo aver ordinato e ricevuto tutti i componenti precedentemente citati, assemblo il drone seguendo questo schema:
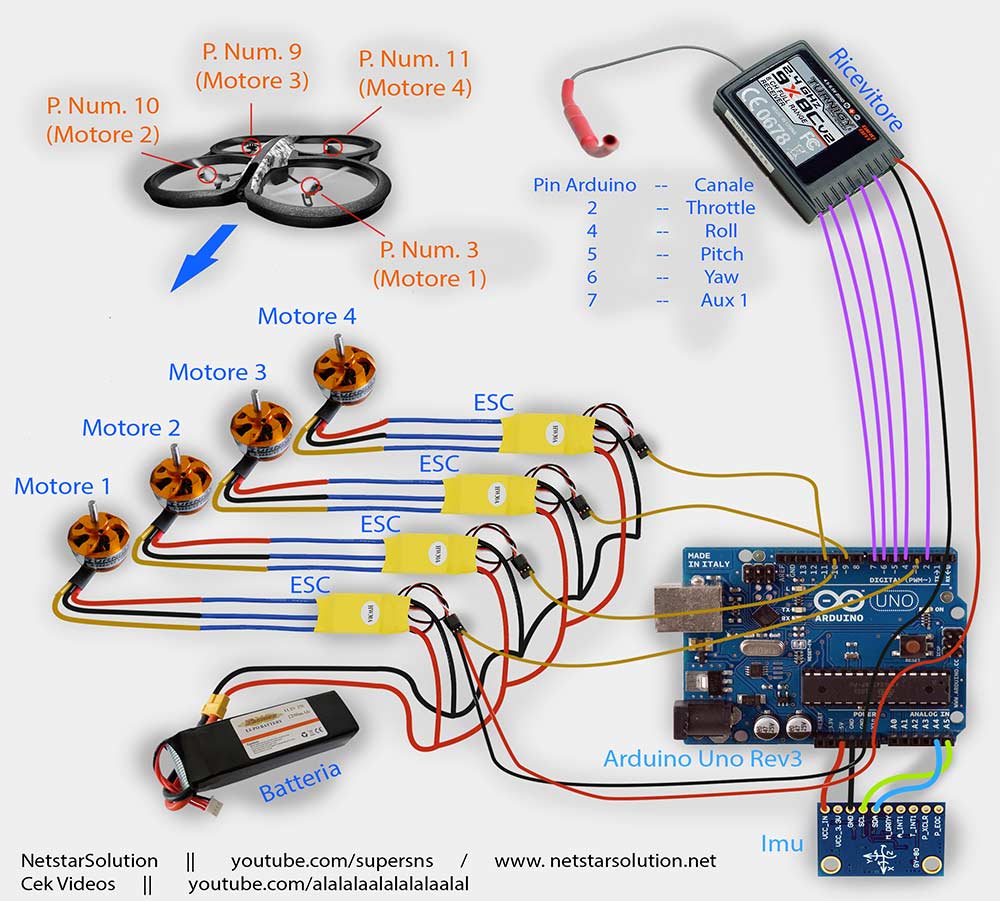
e qualche video trovato in rete, testo e calibro gli ESC uno per volta e funzionano, ma poi arrivo al punto di configurare ed inserire il MultiWii nell'arduino. Quindi configuro il MultiWii 2.4 rimuovendo il commento nella scheda "config.h" sulle voci "#define QUADX" e "#define GY_80" e viene caricato correttamente, però è qui che arriva il problema.
Una volta collegata la LiPo al drone, gli esc emettono dei bip periodici e contemporaneamente i motori effettuano delle piccolissime rotazioni a tratti e provando ad armare i motori o spostando qualsiasi leva del radiocomando, non avviene assolutamente nulla.
La ricevente riconosce il radiocomando in quanto se provo un motore singolo collegato al CH3, funziona senza problemi e se spengo il radiocomando, si spegne il led della ricevente.
Non credo sia un problema di collegamenti in quanto ho ripetuto lo schema milioni di volte.
Se avete bisogno di qualche foto/video del drone, collegamenti o altro, non esitate a chiedere.
Grazie anticipatamente a tutti coloro che cercheranno di aiutarmi in questa impresa
CARATTERISTICHE:
Frame: DJI F450
Motori: Brushless A2212/13T 1000kv
ESC: 30A (abbinati ai motori, non hanno marca)
Eliche: 10x4.5
FC: Arduino UNO R3 + Firmware MultiWii 2.4
IMU: GY 80
LiPo: Zippy 8000mah 3S 11.1V 30C
RC: Fly Sky FS-T6 impostata in mode 2 (a giorni mi arriva la Turnigy 9X)
("Ci sono schede di volo meno costose dell'arduino e più semplici da configurare-Ci sono droni già pronti a poco per i neomodellisti"
Frasi lette in milioni di post, ma in casa avevo questo e non posso nè spendere altri soldi, nè voglio lasciarlo a marcire e poi se non mi complico la vita non ci trovo piacere
Vi spiego quindi il mio problema in cosa consiste precisamente:
Qualche giorno fa, dopo aver ordinato e ricevuto tutti i componenti precedentemente citati, assemblo il drone seguendo questo schema:
e qualche video trovato in rete, testo e calibro gli ESC uno per volta e funzionano, ma poi arrivo al punto di configurare ed inserire il MultiWii nell'arduino. Quindi configuro il MultiWii 2.4 rimuovendo il commento nella scheda "config.h" sulle voci "#define QUADX" e "#define GY_80" e viene caricato correttamente, però è qui che arriva il problema.
Una volta collegata la LiPo al drone, gli esc emettono dei bip periodici e contemporaneamente i motori effettuano delle piccolissime rotazioni a tratti e provando ad armare i motori o spostando qualsiasi leva del radiocomando, non avviene assolutamente nulla.
La ricevente riconosce il radiocomando in quanto se provo un motore singolo collegato al CH3, funziona senza problemi e se spengo il radiocomando, si spegne il led della ricevente.
Non credo sia un problema di collegamenti in quanto ho ripetuto lo schema milioni di volte.
Se avete bisogno di qualche foto/video del drone, collegamenti o altro, non esitate a chiedere.
Grazie anticipatamente a tutti coloro che cercheranno di aiutarmi in questa impresa
Commenta