La nuova frontiera per i multirotori sono i gruppi di sensori MARG, che oltre a gyro e acc aggiungono la bussola.
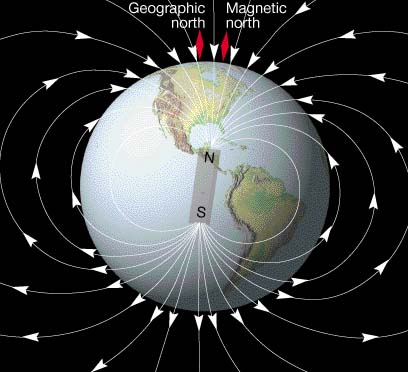
Grazie al sapiente lavoro di un "piccolo" scienziato di nome Sebastian Madgwick, il signore in questione ha saputo sfruttare la pendenza del campo magnetico per aiutare gli altri sensori nell'orientamento del multirotore.
E' si perchè anche se non sembra qui in italia la bussola non dovrebbe indicare solamente il nord, ma punta decisamente verso il basso.
Qual'è il risultato di tutto questo? Il fatto che con 3 sensori non c'e' nessun drift, e il velivolo sa esattamente il suo assetto con una rapidità impensabile fino a qualche tempo fa:
Il calcolo matriciale che il buon scienziato ci ha messo a disposizione è abbastanza semplice persino per un processore come arduino.
Cosa si può fare ora? Dimenticare quel pesante e lento Kalman, e iniziare finalmente la navigazione GPS. Ci mettiamo al lavoro?
Grazie al sapiente lavoro di un "piccolo" scienziato di nome Sebastian Madgwick, il signore in questione ha saputo sfruttare la pendenza del campo magnetico per aiutare gli altri sensori nell'orientamento del multirotore.
E' si perchè anche se non sembra qui in italia la bussola non dovrebbe indicare solamente il nord, ma punta decisamente verso il basso.
Qual'è il risultato di tutto questo? Il fatto che con 3 sensori non c'e' nessun drift, e il velivolo sa esattamente il suo assetto con una rapidità impensabile fino a qualche tempo fa:
Il calcolo matriciale che il buon scienziato ci ha messo a disposizione è abbastanza semplice persino per un processore come arduino.
Cosa si può fare ora? Dimenticare quel pesante e lento Kalman, e iniziare finalmente la navigazione GPS. Ci mettiamo al lavoro?

")

Commenta