Salve a tutti,
Ho costruito un quadricottero con arduino UNO e multiwii 2.2... sembra andare tutto bene quando alla partenza scopro che purtroppo non riesce a sollevarsi da terra in maniera corretta ma si ribalta subito (allego il video) https://youtu.be/kj5LvkibcEQ
I problemi che penso possano causare questo comportamento sono:
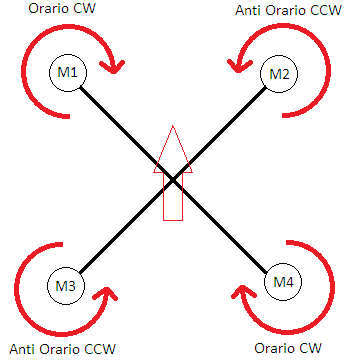
1) Direzione delle eliche e dei motori (anche se ho già controllato);
2) ESC o MOTORI rallentati (non saprei spiegarmi il perchè visto che sono tutti uguali e
li ho calibrati tramite multiwii)
3) imperfetta regolazione dei valori medi di yaw, pitch e roll che dovrebbero stare sui
1500 e che invece con il radiocomando posso solo impostare su valori leggermente più
alti o più bassi...
VI CHIEDO AIUTOOOOO !! Non so + dove sbattere la testa
Grazie a tutti !!
Ho costruito un quadricottero con arduino UNO e multiwii 2.2... sembra andare tutto bene quando alla partenza scopro che purtroppo non riesce a sollevarsi da terra in maniera corretta ma si ribalta subito (allego il video) https://youtu.be/kj5LvkibcEQ
I problemi che penso possano causare questo comportamento sono:
1) Direzione delle eliche e dei motori (anche se ho già controllato);
2) ESC o MOTORI rallentati (non saprei spiegarmi il perchè visto che sono tutti uguali e
li ho calibrati tramite multiwii)
3) imperfetta regolazione dei valori medi di yaw, pitch e roll che dovrebbero stare sui
1500 e che invece con il radiocomando posso solo impostare su valori leggermente più
alti o più bassi...
VI CHIEDO AIUTOOOOO !! Non so + dove sbattere la testa
Grazie a tutti !!

 L'imu deve stare al centro del quad.. Controlla che in multiwiiconf non sia invertito il gyro..se è invertito lui legge dei valori nn corretti e "dice" ai motori di riportarlo in asse quindi si ribalta..
L'imu deve stare al centro del quad.. Controlla che in multiwiiconf non sia invertito il gyro..se è invertito lui legge dei valori nn corretti e "dice" ai motori di riportarlo in asse quindi si ribalta.. 

Commenta