Ciao a tutti! Con un mio amico vorrei costruire un quadricottero utilizzando un raspberry pi per comandarlo. Vi volevo chiedere, secondo voi è possibile costruirne che raggiunga i 50-100 m come prima volta? Ho delle conoscenze basilari di fisica, elettronica e informatica (studio ingegneria informatica).
-
-
Hehehe l'ennesimo...
Cerca!") Sant'Ilario! °L°
Sant'Ilario! °L° -
Mi piacerebbe fare qualcosa di simile a un hubsan 4x H107D, piccolo e maneggevole esiste per caso una lista dei componenti che lo compongono?Commenta
-
Cercaaa! Sei solo l'ultimo di una lunga serie di persone che vogliono farlo, quindi le info ci sono, sbattiti un pochino ;)Sant'Ilario! °L°Commenta
-
Speriamo non il prossimo di un'altrettanto lunga lista di abbandoni e fallimenti!Commenta
-
vorrei precisare una cosa però non ho intenzione di fare tutto con il raspberry. Vorrei utilizzare quest'ultimo solo per quanto riguarda la parte multimediale. Per tutto il resto utilizzerei un microcontrollore.Commenta
-
Allora comincia a far volare un normale quadri e farti una "cultura", poi penserai al resto ;)Sant'Ilario! °L°Commenta
-
Ciao
Per parte multimediale che intendi ? Registrare il volo con la cam del raspy ? Credo che con una qualsiasi action cam fai prima e meglio, con tanto di audio, cosa che il raspy non ha.
Ciao
Sent from my iPhone 4S using TapatalkCommenta
-
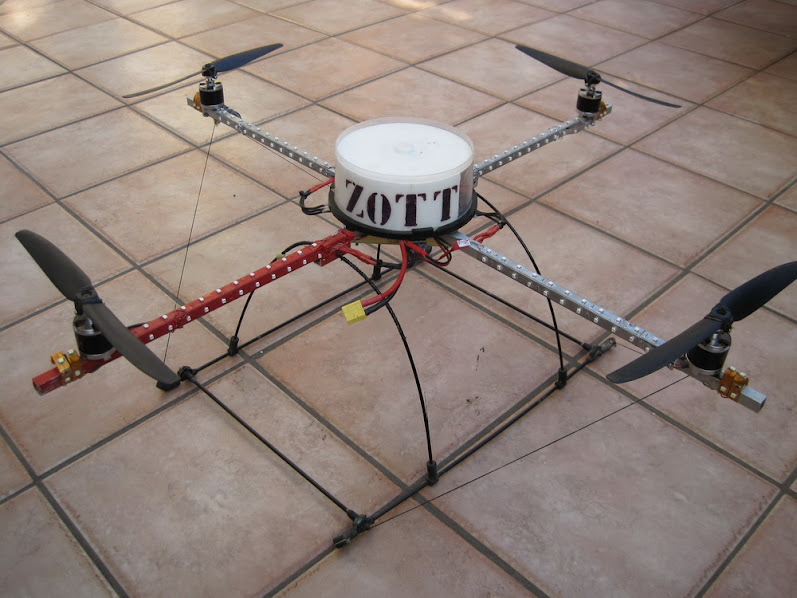
Sì questo, magari anche per interfacciare il quadricottero con un dispositivo android. Farne uno come magari questo qui che hai fatto stesso tu è fattibile come primo progetto?Originariamente inviato da il_Zott Visualizza il messaggio
Magari usando una multavi come FC
Commenta
-
Certo che é fattibile.
Quel multi volava alla grande e pensa che usavo un semplicissima kk con solo tre giroscopi gestiti da un atmega.
Magari il primo fallo simile com grandezza, un multi grandicello é più stabile, ma non è detto che sia pesante, con i quadrelli in alluminio e vetronite pesava poco, mi pare sui 750-800g.
Ciao
Inviato dal mio iPad utilizzando TapatalkCommenta
-
Originariamente inviato da il_Zott Visualizza il messaggio
ciao
toglimi una curiosità
ma la FC comanda i rotori
e poi quella viene collegata direttamente alla ricevente della radio ?Commenta
-
Senti forse ti conviene leggerti un po' delle guide introduttive che trovi all'inizio di questa sezione del forum, perchè mi sembra dalle domande che fai che tu abbia qualche 'lacuna' di base. Te lo dico perchè secondo me non ti servirà solo sapere come collegare i vari pezzi, ma anche come mai vanno connessi proprio in quel modo e non in altri, così, nel caso di malfunzionamenti o modifiche saprai cosa controllare e dove intervenire.Originariamente inviato da antoniokando Visualizza il messaggioCommenta
-
-
Io non sono molto esperto di questo forum... quindi non saprei da dove iniziareOriginariamente inviato da gekomike Visualizza il messaggioCommenta
-
Ciao ti coniglio di leggerti le guide del barone . Piccola spiegazione: un quqdri necessita come ben sai di 4 motori 4 esx 1 fc 1 radiocomando e una batteria (solitamente lipo) motori esc e batteria vanno scelti in base alle prestazioni che si vogliono avere . Quando muovi uno stich del radiocomando mandibun segnale che arriva alla ricevente del quadri che a sua volta lo manda alla fc . La fc elabora il segnale e stabilizza il drone con i vari gioscopi baeometri ( altezza) e gps . La fc viene alimentata ( di solito) da un esc con un bec ( nella maggioranza degli esc è gia presente) . Il bec serve a trasformare la corrente per la fc (5V) . Poi devi collegare il tutto se sbagli anche il posto di un motore rischi al primo avvio il ribaltamento o peggio..... controlla bene le saldature , possono fare la differenza . Questo è un assaggio del nostro mondo. Non prenderlo come oro colato , ma sono le basi necessarie. Peppo
errori ortografici by tapatalkCommenta
Commenta