- APM (e cloni vari) con APMcopter
- PixHawk con APMcopter
- CRIUS AIO PRO con MegaPirateNG
- VRBRAIN (varie versioni) con APMcopter
- ecc.
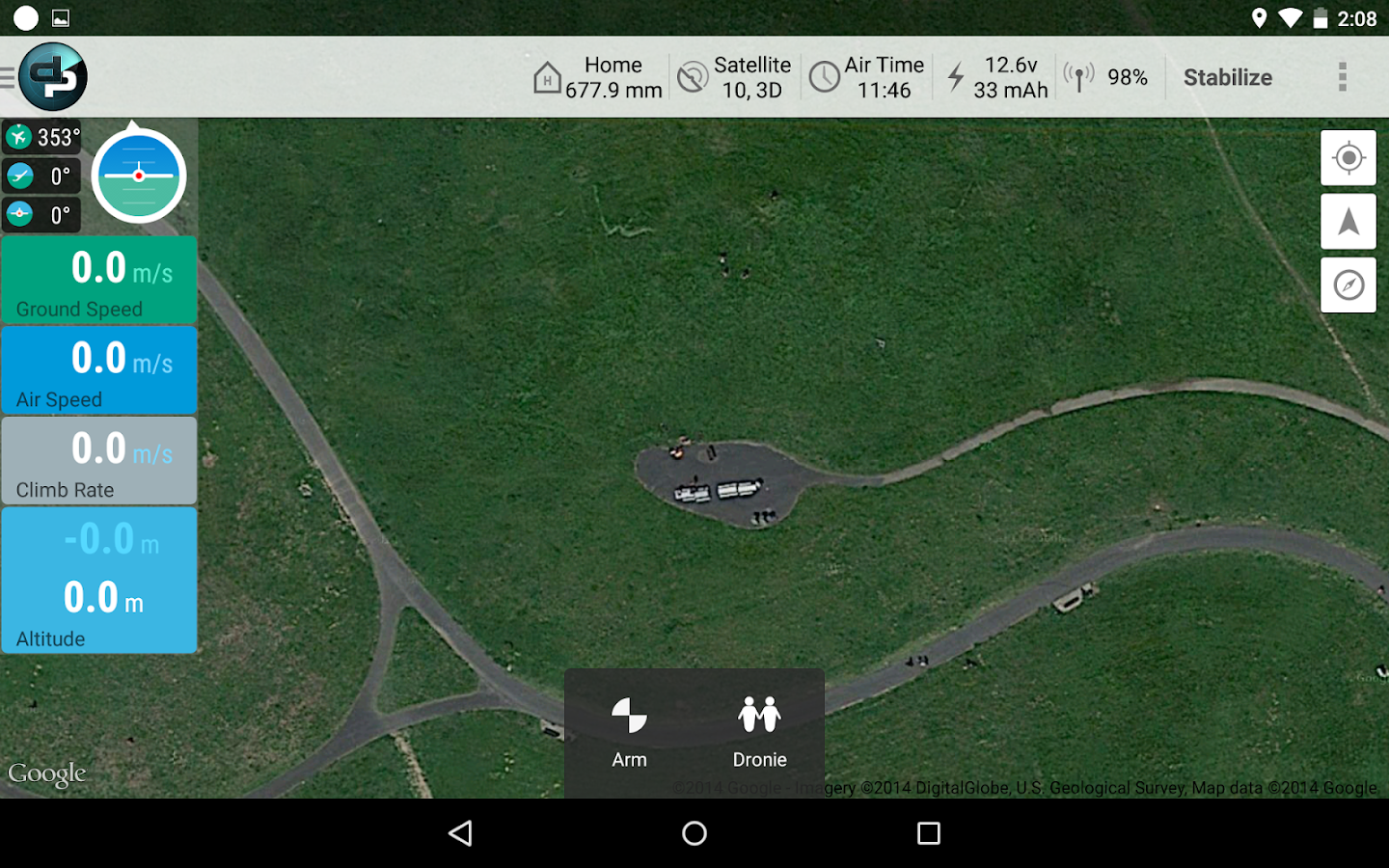
https://play.google.com/store/apps/d...dplanner&hl=it
Oggi ho scaricato la nuova versione e, per familiarizzare con la nuova interfaccia utente, ho provato diverse funzioni
- gestione dei modi di volo
- pianificazione e modifica di una semplice missione
- esecuzione della missione in AUTO da autotakeoff a autoland
- modo guided
- modo follow me
- bottone di decollo automatico
- bottone di Land
La prima impressione è ottima. Particolare attenzione è data agli aspetti di sicurezza. In qualsiasi modo di volo è SEMPRE possibile riprendere il controllo dalla radio RC (anche in GUIDED e FOLLOW ME) semplicemente cambiando il modo di volo dalla radio quindi qualsiasi cosa succeda al tablet la gestione del multirotore è sempre garantita.
Ci sono altre interessanti funzionalità da provare (leash, dronie, ecc.) che sicuramente proverò e riporterò qui le mie impressioni.
Sarò lieto se altri amici volessero accodarsi con le loro prove e report in modo da poter avere qui una informativa più completa su questa interessante GCS.
Luciano


")
Lascia un commento: